safe
1 GW
- Joined
- Dec 22, 2006
- Messages
- 5,681
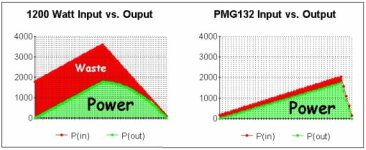
Most of the so called "performance" upgrades that people do have something to do with modifying the controller so as to squeeze that last patch of energy out of the power curve and get that little bit more top end power. The sacrifice comes in the form of heat, all (small) electric motors become less efficient as they allow more current to flow at lower rpms. The more extreme the low end current situation the worse the losses until you have a bike that will get one sort stretch of real power and then run out of juice. (or burnout)
 There's a better way.
There's a better way.
It's always a better idea to use a larger motor and then run that motor at less than it's power peak. You don't want to run it just SLIGHTLY less than it's peak, but in fact WAY less than the peak almost THREE QUARTERS off of the peak power.
Take a look at the chart of a generic electric motor. The yellow is power output and as you go across the rpms (zero is on the right in this one) the power peaks and then declines:
It's always a better idea to use a larger motor and then run that motor at less than it's power peak. You don't want to run it just SLIGHTLY less than it's peak, but in fact WAY less than the peak almost THREE QUARTERS off of the peak power.
Take a look at the chart of a generic electric motor. The yellow is power output and as you go across the rpms (zero is on the right in this one) the power peaks and then declines: