
We have a haptic robotics project at school. It involves designing and making a force reflective robot wrist. The application is in tele-robotics, where a human moves one motorized arm, and those motions are replicated by an identical robot arm at a remote site. Here is an example picture and video of the robot sans wrist:
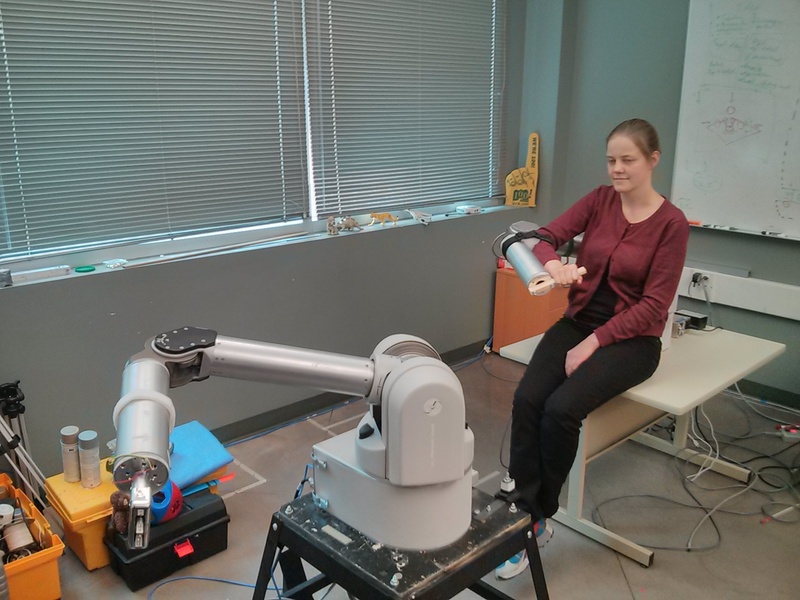
http://webdocs.cs.ualberta.ca/~vis/robotics/telemanip/openHouseDemo.wmv
It is important that the motors have low cogging torque. The motors are driven through a 1:20 ratio cable transmission, so any cogging of the motors feels greatly amplified to the human.
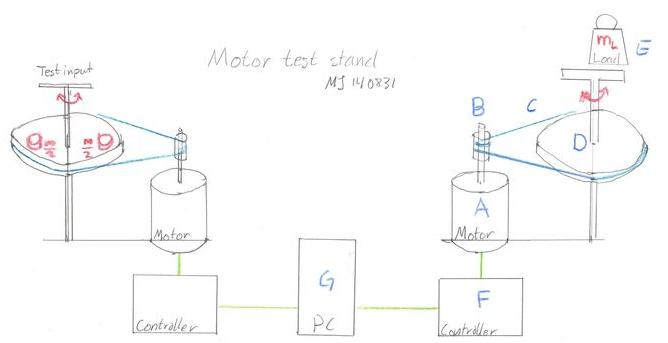
A simpler conceptual illustration of what we want to achieve is shown in this 1DOF teststand drawing: A human turns one end, and the other end replicates that motion. Any force that the other end feels (inertial or external) is replicated back to the human (this is all taken care of through control algorithms.)
We have difficulty finding good motors for this. For the wrist we bought and tested hobbykings two gimbal motors:
http://www.hobbyking.com/hobbyking/...ushless_Gimbal_Motor_Nex5_size_400_800g_.html
http://www.hobbyking.com/hobbyking/store/__45369__Turnigy_HD_5208_Brushless_Gimbal_Motor_BLDC_.html
However despite these are supposed to do precise control of a camera gimbal we found to our dismay that they have just as bad cogging as the average outrunner.
Now some outrunners will have low or no cogging torque, but this is not speced from hobbyking or any of the other web sites. (Not even for professional servo motors like this Maxon inrunner)
http://www.maxonmotor.com/maxon/view/product/motor/ecmotor/ecflat/ecflat45/339287?download=show
So we can't just keep buying motors at random and find they are not good.
Therefore, if you have some outrunners at home and you can test spin them slowly with your finger. Do you feel a cogging torque? That is, an uneven force/resistance where the motor will pop into certain positions, then require force to "cog" to the next?
Please let us know of any outrunners you find with low cogging.
We are primarily interested in 100-500g outrunners for now. Ideally low kV, but we can adjust controller (or worst case rewind).
In a later project we might want larger ones, so please report such also.
B.t.w. there are many gimbal motors here. Anyone tried them?
http://www.rctimer.com/gallery-248.html
Gimbal motors are attractive beacuse of low Kv, but any low cogging outrunner or high torque inrunner would do. We are looking for about 0.25-0.5nm peak torque for <10s (with no magnetic saturation) and maybe 1/10th that continuous.
Thanks,
Martin and haptics project group members.
http://webdocs.cs.ualberta.ca/~vis/robotics/telemanip/openHouseDemo.wmv
It is important that the motors have low cogging torque. The motors are driven through a 1:20 ratio cable transmission, so any cogging of the motors feels greatly amplified to the human.
A simpler conceptual illustration of what we want to achieve is shown in this 1DOF teststand drawing: A human turns one end, and the other end replicates that motion. Any force that the other end feels (inertial or external) is replicated back to the human (this is all taken care of through control algorithms.)
We have difficulty finding good motors for this. For the wrist we bought and tested hobbykings two gimbal motors:
http://www.hobbyking.com/hobbyking/...ushless_Gimbal_Motor_Nex5_size_400_800g_.html
http://www.hobbyking.com/hobbyking/store/__45369__Turnigy_HD_5208_Brushless_Gimbal_Motor_BLDC_.html
However despite these are supposed to do precise control of a camera gimbal we found to our dismay that they have just as bad cogging as the average outrunner.
Now some outrunners will have low or no cogging torque, but this is not speced from hobbyking or any of the other web sites. (Not even for professional servo motors like this Maxon inrunner)
http://www.maxonmotor.com/maxon/view/product/motor/ecmotor/ecflat/ecflat45/339287?download=show
So we can't just keep buying motors at random and find they are not good.
Therefore, if you have some outrunners at home and you can test spin them slowly with your finger. Do you feel a cogging torque? That is, an uneven force/resistance where the motor will pop into certain positions, then require force to "cog" to the next?
Please let us know of any outrunners you find with low cogging.
We are primarily interested in 100-500g outrunners for now. Ideally low kV, but we can adjust controller (or worst case rewind).
In a later project we might want larger ones, so please report such also.
B.t.w. there are many gimbal motors here. Anyone tried them?
http://www.rctimer.com/gallery-248.html
Gimbal motors are attractive beacuse of low Kv, but any low cogging outrunner or high torque inrunner would do. We are looking for about 0.25-0.5nm peak torque for <10s (with no magnetic saturation) and maybe 1/10th that continuous.
Thanks,
Martin and haptics project group members.