BionX D-series is the latest Hub motor from BionX.
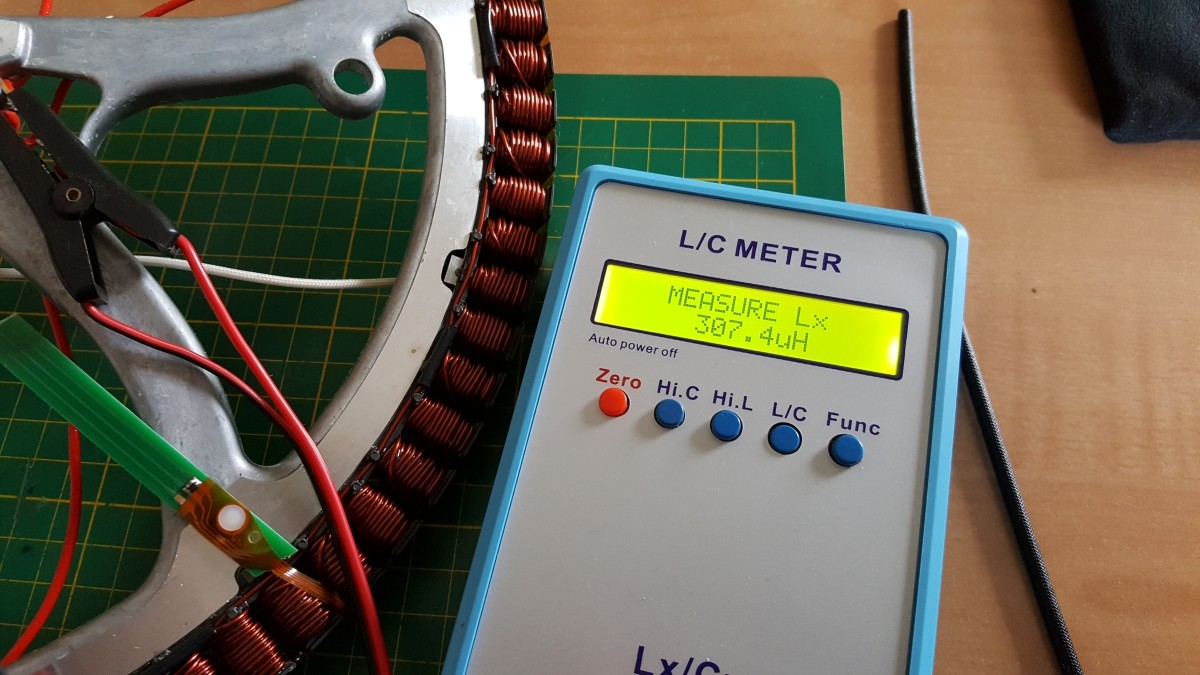
Owners reported this drive is the "wolf in sheep's clothing" as it draws >1000W from the battery (measured by owner), and at the same it isn't sufferend from the overheating issues the previous motor generations had in steep terrain.
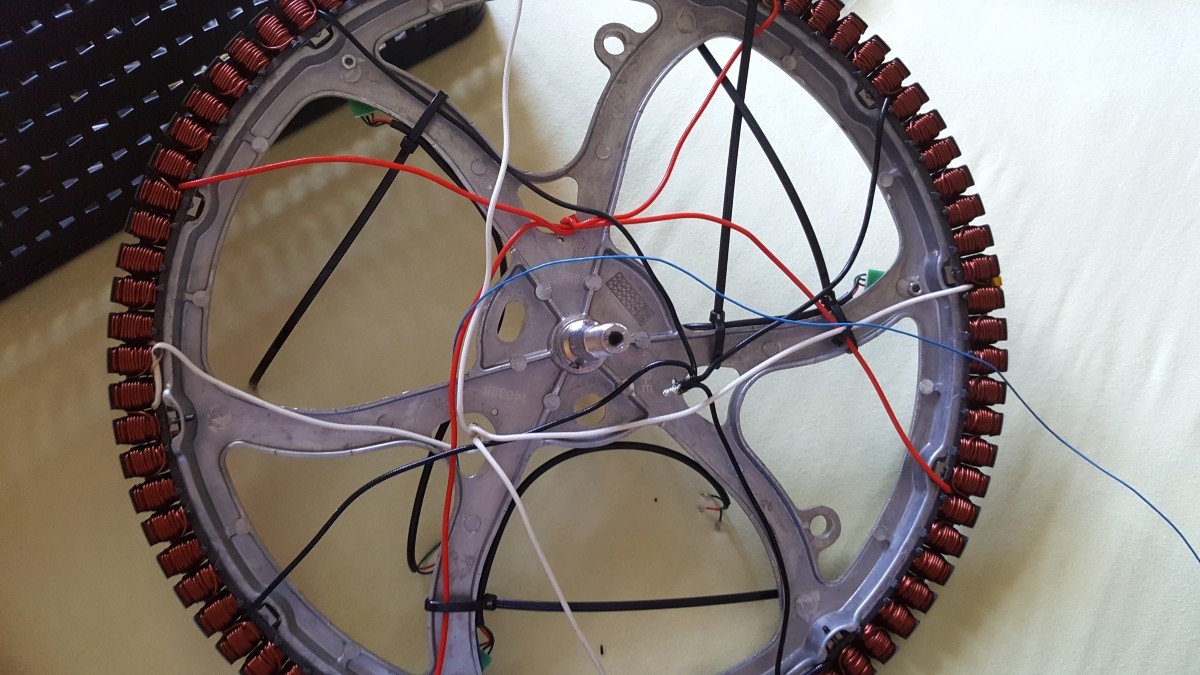
Another awesome feature are the centered spokes which should improve the flex (mass dampening) and stability of the (bicycle) wheel.
This was reason enough for me to search ebay every week for auctions, and 2 weeks ago i had luck")
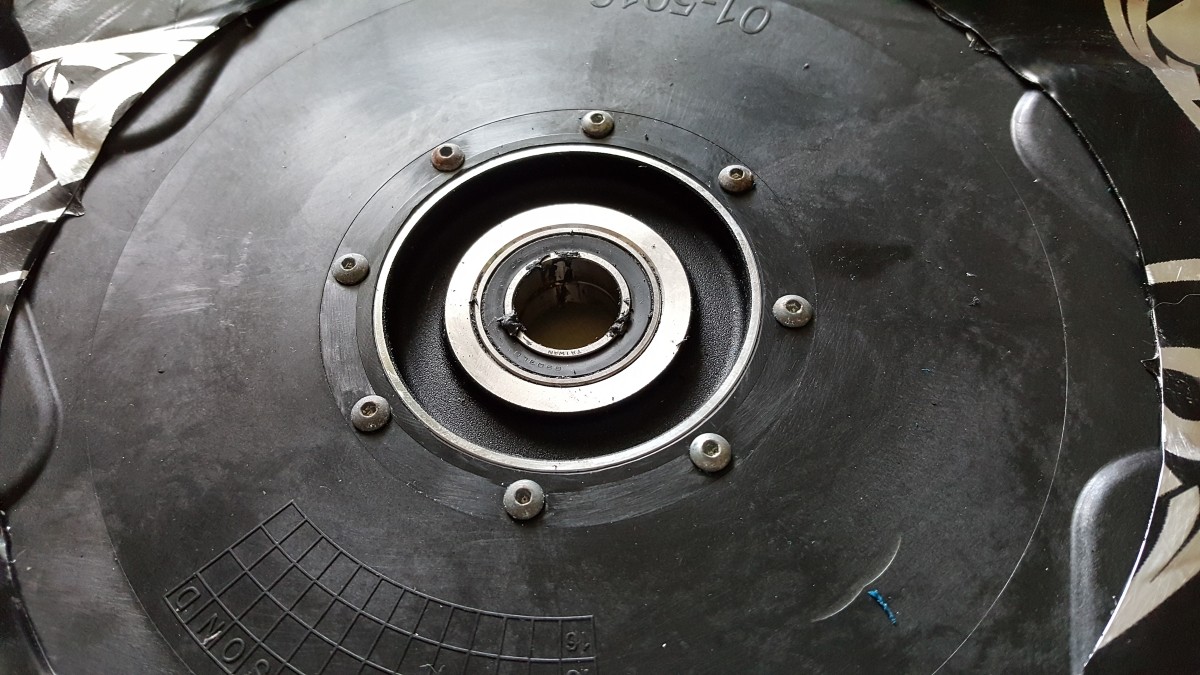
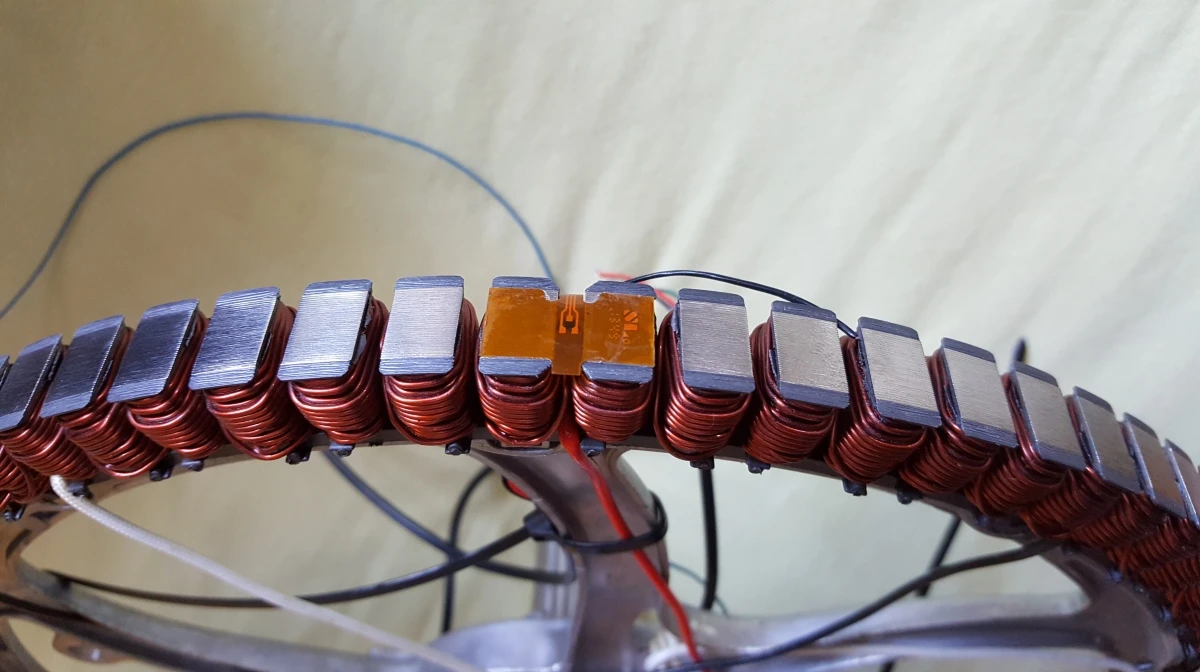
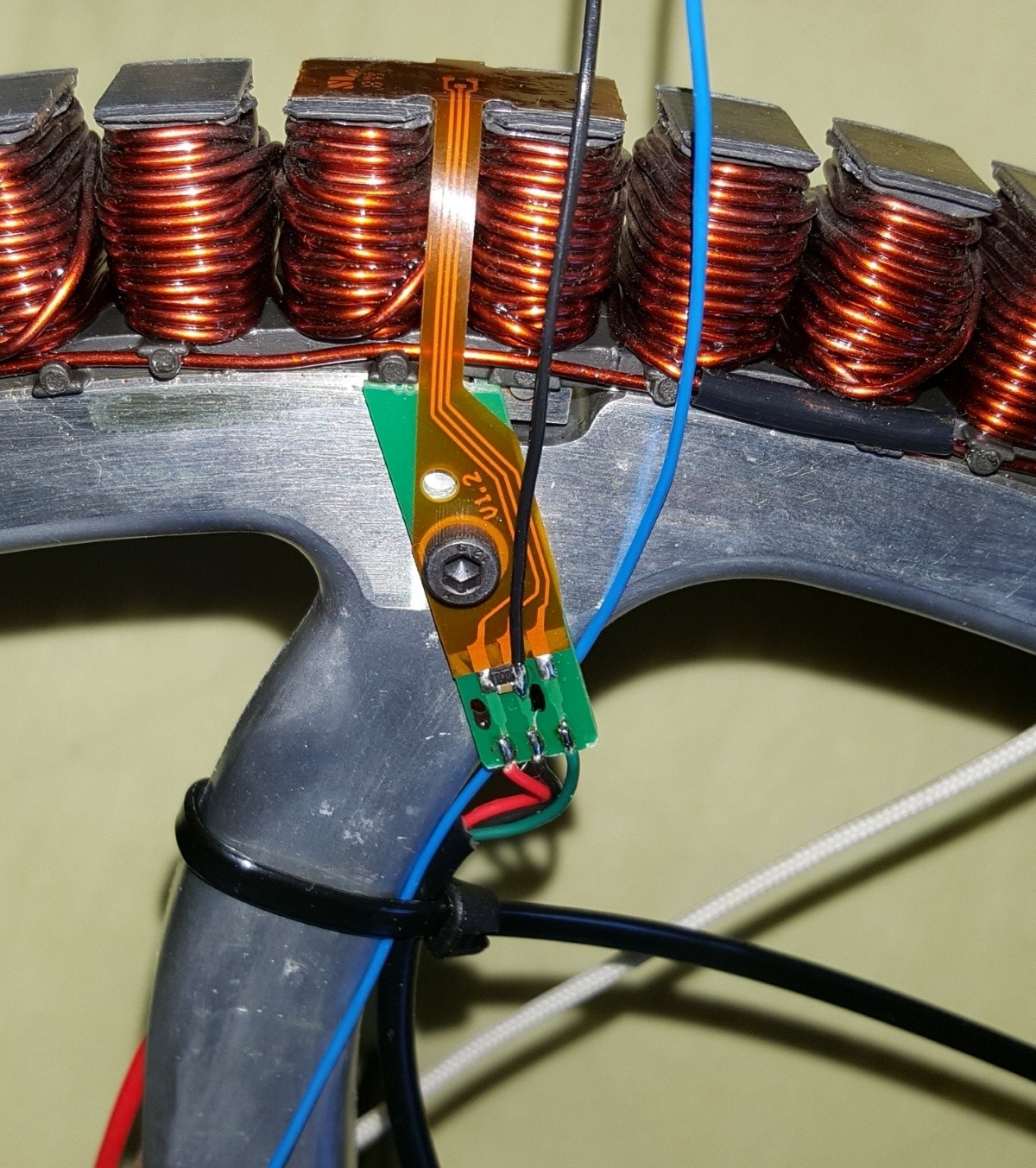
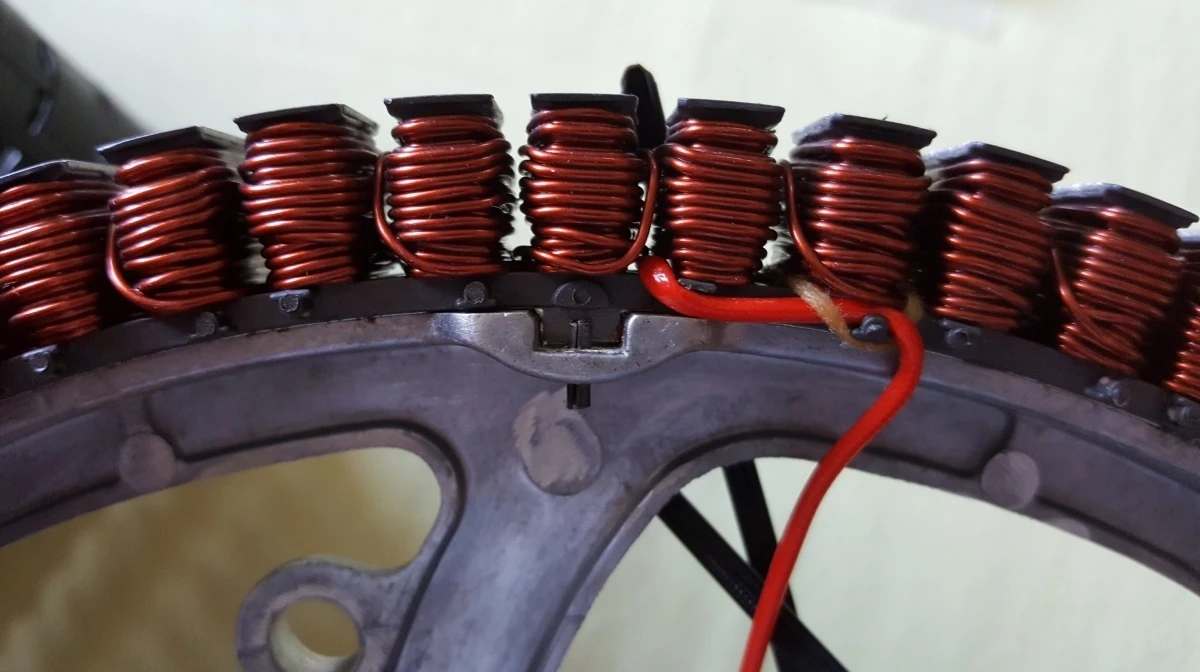
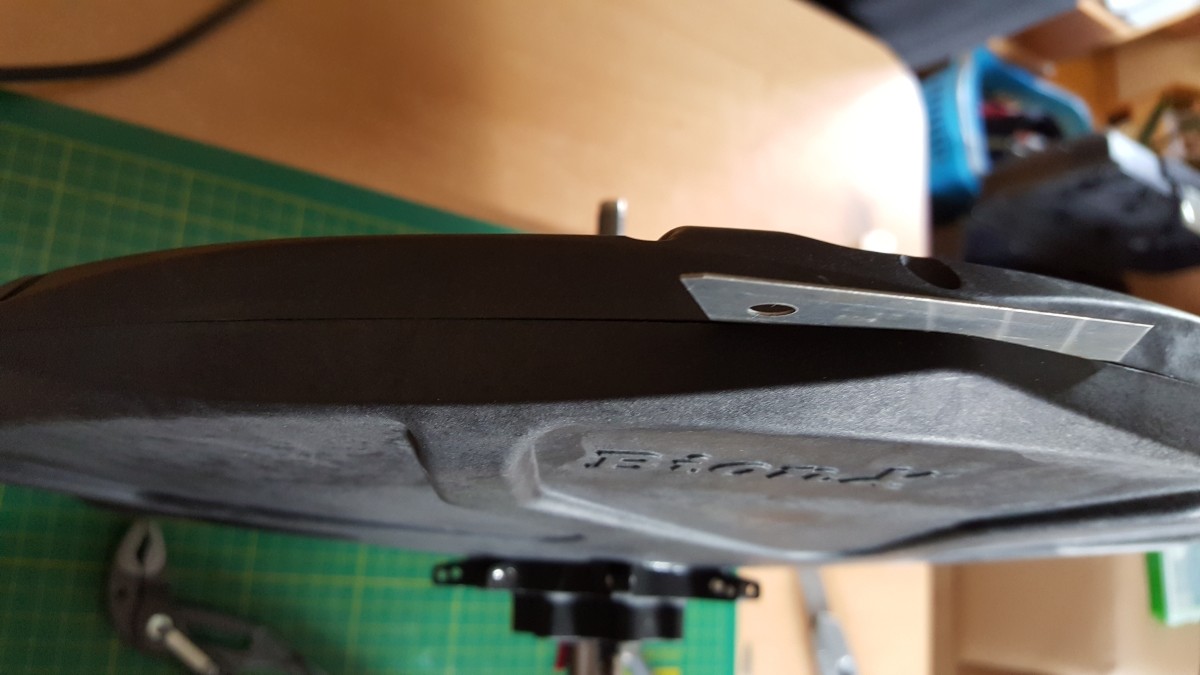
First step was to open the motor WITHOUT damaging the case. Aside from the bolts it is also sticked together. With an heatgun and a knife + scraper it burst open and nothing broke:

Owners reported this drive is the "wolf in sheep's clothing" as it draws >1000W from the battery (measured by owner), and at the same it isn't sufferend from the overheating issues the previous motor generations had in steep terrain.
Another awesome feature are the centered spokes which should improve the flex (mass dampening) and stability of the (bicycle) wheel.
This was reason enough for me to search ebay every week for auctions, and 2 weeks ago i had luck
First step was to open the motor WITHOUT damaging the case. Aside from the bolts it is also sticked together. With an heatgun and a knife + scraper it burst open and nothing broke: