Yes, the motors run much cooler, so there is no fear of permanent magnets losing magnetization. the magnets do not provide any of the torque or power, they are only used to guide the magnetic path, so they do not need to be strong. A high-quality ferrite magnet will work, which will never be in short supply (China is restricting the use of Neodymium magnets so they will become expensive, and maybe unavailable).
The SR laminations still have some eddy-current heat, but the magnetic paths are always in the same direction, so there are no reversals, An alternating magnetic path is hotter than simply turning on-and-off a magnetic flux path that is always in the same direction. Permanent magnets in a PM motor (like ebike hubmotors) are a solid chunk of metal (not laminated), and a solid chunk of metal passing through a magnetic field will create some eddy-current heat. In an SR motor, the guide-magnets travel with the magnetic path, they do not pass through it.
For the "salient" lobes (I did not hear the phrase salient until a week ago). Here are some examples below:
View attachment 7
Above is a permanent magnet rotor, the magnets are embedded slightly deeper so they are a little farther away from the magnetic fields of the electromagnets, this allows them to run a little cooler. It is called "Interior permanent magnet /IPM, instead of the common "surface mount magnets"
View attachment 6
Switched Reluctance / SR rotor with Eight salient lobes. No magnets here, only laminated steel. It could be used in an 10/8 or 12/8 configuration.

one phase of the 4-phase 8/6 SR motor

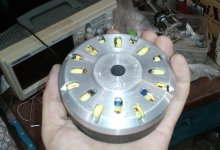
Synchronous Reluctance (SynR) rotor being installed into an industrial inductance stator
View attachment 3
The flux paths of a SynR rotor, no magnets, only laminated steel shown

Thin steel laminations in reluctance motors

a simple 3-phase 6/4 SR motor

A simple 3-phase 6/4 SR motor