
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
RC-Type Hubmotor
- Thread starter crossbreak
- Start date
salty9
1 kW
Crossbreak,
I am intrigued by your animation in your OP and am wondering whether index marks could be placed on the planet carrier and outer ring which would allow fairly precise estimation of the gear ratio by counting.
I am intrigued by your animation in your OP and am wondering whether index marks could be placed on the planet carrier and outer ring which would allow fairly precise estimation of the gear ratio by counting.
Or, you could use my spreadsheet calculator......salty9 said:.... am wondering whether index marks could be placed on the planet carrier and outer ring which would allow fairly precise estimation of the gear ratio by counting.
")
http://www.endless-sphere.com/forums/viewtopic.php?p=442010#p442010
crossbreak
1 MW
Or, you could use my spreadsheet calculator......
that's what it was made for...
my rear drive blog will continue in a new thread:
http://endless-sphere.com/forums/viewtopic.php?f=3&t=34146
crossbreak
1 MW
InRunner front Hubmotor for common 100mm wide forks
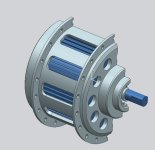
This is an Inrunner design, using the well known and above described planetary gearbox configuration. The space within the rotor of an InRunner BLDC motor, which is normally unused, encloses a speed reduction gearbox, having 9.33:1 reduction raio. This has great advantages in both space use and possible weight reduction.
The motor shown here is very similar to miles 90mm InRunner BLDC motor, having 18teeth and 10pole pairs. The major difference is that it has a thicker 40mm stator stack. Outer diameter of the gearbox is less than 55mm, when using module 1 gears. The inrunner BLDC motor used in the GNG Gen1 Kit, would also fit, but it has a shorter stator, so the gears would also have to be shorter to fit into the housing.
The motor is air cooled. The air enters the hub through axial holes and is forced to the radial exits by centripetal forces induced by the rotation of the hub. The InRunner motor is protected from dirt etc. by an own housing with fins for increased heat rejection.
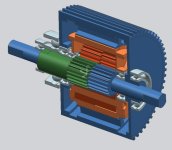
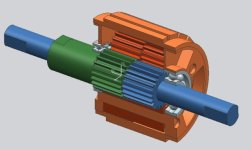
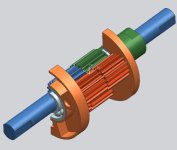
Blue: Fixed parts, including stator, axle, stator housing and fixed gear (20teeth)
Orange: Rotor parts with Planetary carrier
Red: Planetary Gears (15 and 16teeth)
Green: Output Gear (21teeth)
These teeth counts where chosen since they offer both a very compact gearbox and a high reduction ratio. If the blue fixed gear is about 4/3 times the tooth count of the planets, this gearbox config becomes most compact for reduction ratios reasonable for hubmotors. It's the region between 5:1 and 15:1. It would be better to use hardened helical gears, for both lower noise operation and higher torque durability. For a prototype I would want to use straight gears, since they are cheaper. The three planetary double-gears (each consisting of one 15t and one 16t gear) have to be fixed in a special angle, which differs for all three planetary-double-gears. If they are not fixed to each other in the perfect right angle, it will be impossible to assemble the last two double-gears, after the first one was inserted.
Seals are still missing in this first design. It is proposed to keep abrasive parts inside the rotor, which are created due wear of the gears. To protect the magnet system of the BLDC motor from these magnetic particles, they just stay inside the rotor. This also keeps lubricant inside. Additionally it is suggested to use seals for keeping dirt out of the (blue) motor housing. For this purpose, common sealed bearings can be used. They are used in all common bycicle hub-motor as axle bearings.
There is a freewheel clutch, similar to the Stieber CSK-20 build into the hub, connecting the output gear (green) with the hub. It disconnects the motor while not using it, just like all known geared hub-motors use to do.
The stator winds are missing, just costs too much performance for my CAD computer. The phase wires will leave the unit through the right side, I used a oversized 20mm inner diameter axle bearing, to keep some space for those wires.
This is an Inrunner design, using the well known and above described planetary gearbox configuration. The space within the rotor of an InRunner BLDC motor, which is normally unused, encloses a speed reduction gearbox, having 9.33:1 reduction raio. This has great advantages in both space use and possible weight reduction.
The motor shown here is very similar to miles 90mm InRunner BLDC motor, having 18teeth and 10pole pairs. The major difference is that it has a thicker 40mm stator stack. Outer diameter of the gearbox is less than 55mm, when using module 1 gears. The inrunner BLDC motor used in the GNG Gen1 Kit, would also fit, but it has a shorter stator, so the gears would also have to be shorter to fit into the housing.
The motor is air cooled. The air enters the hub through axial holes and is forced to the radial exits by centripetal forces induced by the rotation of the hub. The InRunner motor is protected from dirt etc. by an own housing with fins for increased heat rejection.
Blue: Fixed parts, including stator, axle, stator housing and fixed gear (20teeth)
Orange: Rotor parts with Planetary carrier
Red: Planetary Gears (15 and 16teeth)
Green: Output Gear (21teeth)
These teeth counts where chosen since they offer both a very compact gearbox and a high reduction ratio. If the blue fixed gear is about 4/3 times the tooth count of the planets, this gearbox config becomes most compact for reduction ratios reasonable for hubmotors. It's the region between 5:1 and 15:1. It would be better to use hardened helical gears, for both lower noise operation and higher torque durability. For a prototype I would want to use straight gears, since they are cheaper. The three planetary double-gears (each consisting of one 15t and one 16t gear) have to be fixed in a special angle, which differs for all three planetary-double-gears. If they are not fixed to each other in the perfect right angle, it will be impossible to assemble the last two double-gears, after the first one was inserted.
Seals are still missing in this first design. It is proposed to keep abrasive parts inside the rotor, which are created due wear of the gears. To protect the magnet system of the BLDC motor from these magnetic particles, they just stay inside the rotor. This also keeps lubricant inside. Additionally it is suggested to use seals for keeping dirt out of the (blue) motor housing. For this purpose, common sealed bearings can be used. They are used in all common bycicle hub-motor as axle bearings.
There is a freewheel clutch, similar to the Stieber CSK-20 build into the hub, connecting the output gear (green) with the hub. It disconnects the motor while not using it, just like all known geared hub-motors use to do.
The stator winds are missing, just costs too much performance for my CAD computer. The phase wires will leave the unit through the right side, I used a oversized 20mm inner diameter axle bearing, to keep some space for those wires.
Attachments
crossbreak
1 MW
Max torque for a hardened, 20mm wide module 1 helical gear with 20teeth would be 17Nm. When using 5 planet double gears, the max output torque would be 85Nm, which is quite impressive for such a small motor. It's almost the same size as a bafang SWXH. This combined with very good efficiency of miles inrunner should make a decent setup.
Interesting, cb. That planetary configuration is really quite useful....
I think you might need to upgrade the clutch to a CSK25.....crossbreak said:Max torque for a hardened, 20mm wide module 1 helical gear with 20teeth would be 17Nm. When using 5 planet double gears, the max output torque would be 85Nm, which is quite impressive for such a small motor. It's almost the same size as a bafang SWXH.
What I do is model the coil as a solid section and modify the density property to match the fill ratio. That way, you can keep a running check on the mass.crossbreak said:The stator winds are missing, just costs too much performance for my CAD computer.
crossbreak
1 MW
Upgrading to CSK25 is already done. This way, the axle bearings can be fittet inside and some 8mm width can be saved. There are still flaws in that design, it does not fit into a 100mm fork. Changed the stator stack to 25mm, the gears for 10mm wide ones. Now it has more air in it and uses almost only stock parts. It fits now into a 100mm fork and there is space left for a brake disk and thicker phase wires. outer dimensions are a bit smaller than the SWXH, so we can use a SWXH hub for our prototype. I think about downgrading to 10mm axle and use a special build-in torque arm, like the ones sachs used for its 3speed gear hub with build-in pedal rear brake.
Thanks a lot for your comments! This time it should end up with a working prototype, now that we can buy almost every part that is needed. Hope we can outperform even the new KTM hub. The model is now @ 1.9kg without copper mass. I'll add that as miles proposed
Thanks a lot for your comments! This time it should end up with a working prototype, now that we can buy almost every part that is needed. Hope we can outperform even the new KTM hub. The model is now @ 1.9kg without copper mass. I'll add that as miles proposed
Time to time I am thinking about two-way controllable bearing/clutch. The idea is to be able to lock it only in one way. This would allow a compact automatic gearbox with 2-3 gears... But could not find any available, only in patents.
If one could get 2.8Nm cont. out of the motor, that would be about 26Nm at the wheel. Say, around 750 Watts continuous....crossbreak said:Changed the stator stack to 25mm, the gears for 10mm wide ones. Now it has more air in it and uses almost only stock parts. It fits now into a 100mm fork and there is space left for a brake disk and thicker phase wires. outer dimensions are a bit smaller than the SWXH, so we can use a SWXH hub for our prototype.
crossbreak
1 MW
Found a unit that uses balls. It's a ball dog clutch that can be printed using a 3D printer. I can post here when 8 have found it. Do you have some patent numbers for us?
crossbreak
1 MW
Miles said:If one could get 2.8Nm cont. out of the motor, that would be about 26Nm at the wheel. Say, around 750 Watts continuous....
I calc with peak torque, which the gears have to last. Is 2.5 times peak to continous torque ratio a number I can calc with, considering the good heat rejection?
MBI, SRAM and Sturmey Archer have 2 speed RD hub patents, as does Justin, of course.....crossbreak said:Do you have some patent numbers for us?
Well they won't be spending a lot of time at peak torque throughput, however you define it... For gear wear, I would have thought 1.5 times cont. torque is fine?crossbreak said:I calc with peak torque, which the gears have to last. Is 2.5 times peak to continous torque ratio a number I can calc with, considering the good heat rejection?Miles said:If one could get 2.8Nm cont. out of the motor, that would be about 26Nm at the wheel. Say, around 750 Watts continuous....
crossbreak
1 MW
Miles said:MBI, SRAM and Sturmey Archer have 2 speed RD hub patents, as does Justin, of course.....crossbreak said:Do you have some patent numbers for us?
Interesting...still, you got any patent numbers to add here?
Good to know, with 1.5 times my calc at least is not way off... the 25mm stack version looks like it's worth a try.
For a descent setup i'd like 200Nm in the first and 75Nm in the second gear. 5kg rear hub weight would be OK then
crossbreak
1 MW
An outrunner like the SWXH would still outperform this motor if water cooled and using ring gears, having the same reduction ratio. Maybe this should be the one to focus. Torque on gears is absolutely no issue here. 200Nm output would almost need the same weight.
This leads the way back to my OP. The 80mm motor maybe was just to small, we should think of a motor with 110mm outer dia like the rotomax 80cc. The stack incl. Wireing is only 35mm wide here, leaving a lot of room for the gearbox. With water cooling we can reach the 3kw+ region, still having a lightweight hub, since the parts for cooling are mounted on the frame.
This leads the way back to my OP. The 80mm motor maybe was just to small, we should think of a motor with 110mm outer dia like the rotomax 80cc. The stack incl. Wireing is only 35mm wide here, leaving a lot of room for the gearbox. With water cooling we can reach the 3kw+ region, still having a lightweight hub, since the parts for cooling are mounted on the frame.
crossbreak
1 MW
I calced a bit. 140Nm continuous torque would be realistic for a 80cc rotomax and 1:18 reduction ratio. Module 1.5 gear must be only 8mm wide to stand the torque, using an 60T ring gear. Seems like my first approach can still outperform everything, if cooling was no issue. Great thing is, when using ring gears almost any gear ratio is within spec, we could use the 80cc Rotomax with its original 193KV wind and still get great torque and efficiency figures, at about 4.5kWatt at the rear wheel. This could still be done with a hub weight well below 3.5kg.
With such a setup, where is the need for shifting gears? It could lift a 120kg bike up a 36 degree hill... no shifting means a lot less struggle, plz convince me of the opposite
This setup still would go the magic 35mph on flat terrain, using 26inch rims and 14s lipo battery
Sounds nice, but it's not done yet. Circuit, before we may think about regen a lot else has to be done...
With such a setup, where is the need for shifting gears? It could lift a 120kg bike up a 36 degree hill... no shifting means a lot less struggle, plz convince me of the opposite
This setup still would go the magic 35mph on flat terrain, using 26inch rims and 14s lipo battery
Sounds nice, but it's not done yet. Circuit, before we may think about regen a lot else has to be done...
I've said all I can be bothered to in this thread: http://endless-sphere.com/forums/viewtopic.php?f=30&t=47930crossbreak said:With such a setup, where is the need for shifting gears? It could lift a 120kg bike up a 36 degree hill... no shifting means a lot less struggle, plz convince me of the opposite
crossbreak said:Interesting...still, you got any patent numbers to add here?
http://www.diro-konstruktion.de/Englisch/index2.html
Attachments
Love the inrunner design! Direct cooling path for the windings.
Suggestions only:
Forget the whole comparing against a water cooled SWXH outrunner. Forget regen. Forget the two speed. This is a perfect stealth motor for folks who still like to pedal.
Shoot for 1kw continuous at 90% efficiency and the same peak torque as a cromotor
Suggestions only:
Forget the whole comparing against a water cooled SWXH outrunner. Forget regen. Forget the two speed. This is a perfect stealth motor for folks who still like to pedal.
Shoot for 1kw continuous at 90% efficiency and the same peak torque as a cromotor
crossbreak
1 MW
The only problem i see is that this would be the most expensive motor ever build. The gears alone cost over 200bucks :? Miles inrunner isn't the most cost effective design also, it's designed for good efficiency, low torque ripple, weight and rotor enertia.
crossbreak
1 MW
Miles said:Even Maxon are developing hub motor designs......
Very interesting patent. This is also is a very high reduction ratio design. This is different from the new KTM/Panasonic hubmotor, which also uses inrunner+helical gears, which is VERY similar to the Cute Q85 :? http://endless-sphere.com/w/index.php/Cute_Q85
This is a translated version of an article about that new Panasonic motor, which claims that it can have recuperation ?!?! :
http://translate.google.com/transla...ke-motor-ohne-hitzeprobleme/id_60733580/index
original link: http://www.trax.de/panasonic-neuer-e-bike-motor-ohne-hitzeprobleme/id_60733580/index
Similar threads
- Replies
- 991
- Views
- 240,882
- Replies
- 9
- Views
- 6,412