Kingfish
100 MW
Good stuff guys.
<slurp coffee> KF
- +2 Both motors equal. The field tests agree
")
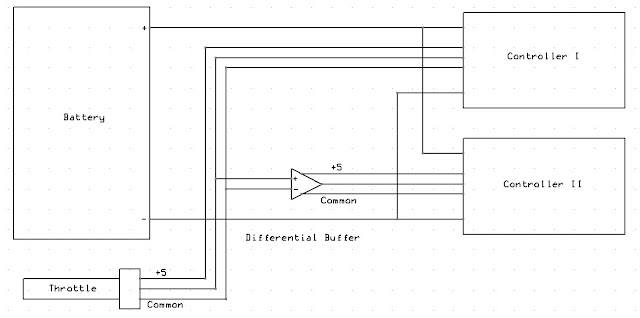
- +2 Both controllers equal. Likewise with above I agree completely, although with different power settings to avoid contention. The alternative is a <hint hint> multichannel (initially-dual) controller that understands and compensates when one wheel slips more than the other. Downgrading the front will prevent slippage; the amount though depends upon the terrain and environment and tires. If it were an easy option, I would like to change the ratio of sharing on-the-fly so long as contention was managed. See next item.
- +1 on the Unified Throttle; work needs to be done here to create a commercial offering. As a wishful feature, imagine a secondary ring that could be set on-the-fly that balances attenuates the signal of A||B from 1:1 to < 1. The idea came to me from an old A/V receiver that had two volume controls: Gross & Fine on concentric rings. The load-sharing ring would simply attenuate the selected (or perhaps non-favored) signal. This in my mind would provide quite a bit of control, and complement the 3-Way current control. Ah, here's a thought: The Throttle and 3-Way should be unified as well – right where the thumb can get to it. :wink:
<slurp coffee> KF