Lightrule
1 mW
- Joined
- Oct 20, 2019
- Messages
- 15
Hey all, I'm new to this forum ") I'm about to start a conversion project with the help of a colleague from work. We're about to electrify an old Honda CB1 motorcycle (or CB400F in other markets). The main purpose of the motorcycle is for driving the distance between my hometown Zwolle (the Netherlands) and the eastern part of the country, which is where my parents and girlfriend live. I'm going to use the motorcycle only on days where conditions are "good" i.e. not too cold and no rain / wet roads. As to the 'why' of the project: I'm stoked about electric vehicles and I've got a passion for riding motorcycles. These two combined along with the desire to learn more about the underlying technology of EV's is why I'm doing this!
I'm about to start a conversion project with the help of a colleague from work. We're about to electrify an old Honda CB1 motorcycle (or CB400F in other markets). The main purpose of the motorcycle is for driving the distance between my hometown Zwolle (the Netherlands) and the eastern part of the country, which is where my parents and girlfriend live. I'm going to use the motorcycle only on days where conditions are "good" i.e. not too cold and no rain / wet roads. As to the 'why' of the project: I'm stoked about electric vehicles and I've got a passion for riding motorcycles. These two combined along with the desire to learn more about the underlying technology of EV's is why I'm doing this!
As for a little bit more on my background: I'm 29 years old with an engineering degree in logistics. I didn't have any meaningful experience with electrical systems before I started researching relevant topics for this project but thanks to the help of a colleague (who's an electrical engineer) and raw dedication I'm feeling confident this project will be a success!
So here is what I have in mind for the motorcycle requirements:
Required range
64 kilometers (40 miles) minimum. I'll be driving on roads with mainly 80 km/h speed limit so I guess my average speed will be around 60 km/h on the above mentioned route.
Required top speed
90 km/h (56 mph) to overtake any slow vehicles (faster is bonus)
Required acceleration
0 - 90 km/h (0 - 56 mph) in 10-13 seconds (quicker is bonus)
Charging
Since the motorcycle won't be for making long distance trips (I'm building it mainly for a specific route) I decided to go with the slow charging option (regular 220v 15A socket at home).
Weight
Haven't calculated the exact weight yet but I'm thinking the electric motorcycle (including myself driving it) will weigh around 250 kilos (or 551 lbs).
To achieve these requirements I'm planning on using the following components:
Donor bike
Honda CB1 (or CB400F) from 1991. I'll add some pictures of it in the next post. I chose this bike because of the "open" frame which creates lots of space for the EV-components when the engine block is removed. Also it's a 400cc bike so it's probably lightweight (frame wise). Plus the colors, I love them!
Hubmotor
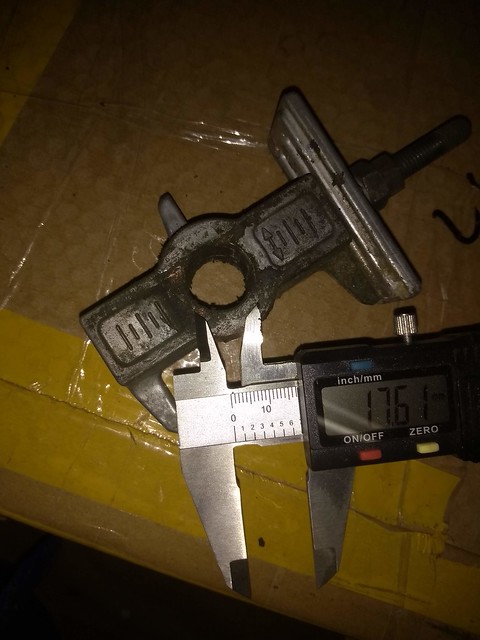
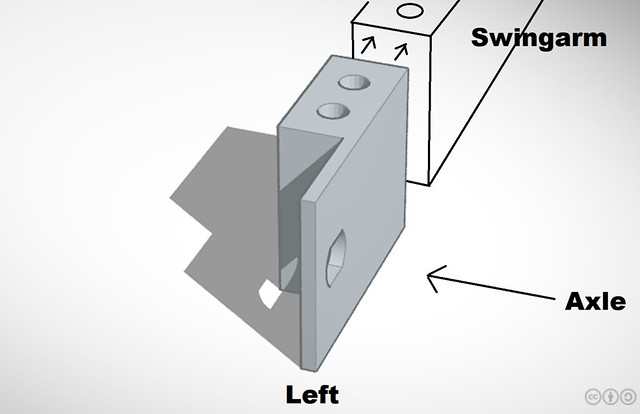
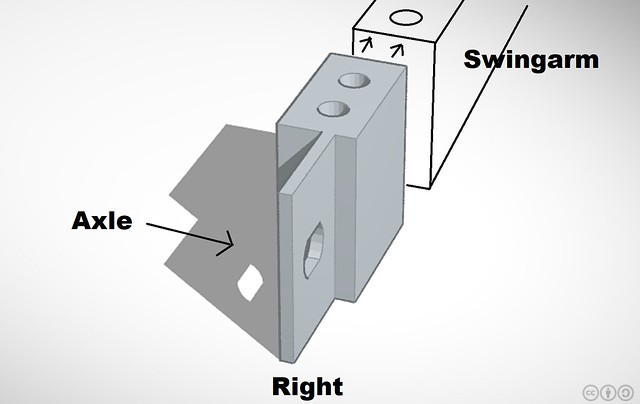
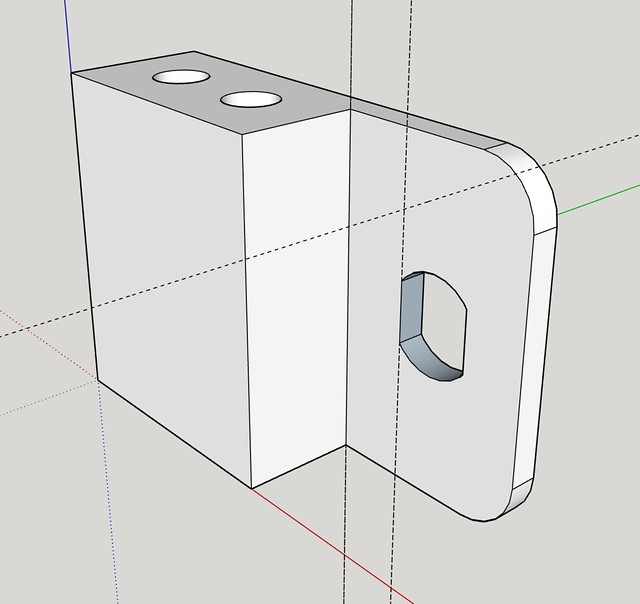
QS Motor 8000w rated hubmotor (16000watt peak according to their website) 17 inch. I hope the M18 axle it comes with will fit into the swingarm but I doubt it. This will probably require some machining (which I'll be outsourcing since I don't have any large machines myself).
Battery
6,2kWh (or thereabouts) made from lithium-ion 18650 cells. I already bought 106 pieces of new LG INR18650-M29 2850mAh - 10A cells to create a "temporary" 96V and 26s4p battery to get the motorcycle working (although I'll be limiting the hubmotor load to 1250w to avoid frying the battery). I'm doing it this way to create a working "showcase" of the motorcycle with which I think I can attract financial donations from fellow colleagues and friends. With these donations I'm upgrading the battery to 26s22p. By then I can use the full power of the hubmotor. Also I'll be using the Vruzend v2.1 modular battery kit to assemble the individuals cells into one battery. These are rated for 20A power draw per cell but according to my calculations I'll be drawing less than 10A per cell at peak load, both in the temp battery as well as in the final battery.
For the minium required kWh, I used the following calculation:
69wh * 64km = 4416wh <----- average consumption of energy per kilometer times kilometers of riding
then 4416 * 1.2 = 5299wh <----- since fully discharging the batteries is a bad idea I kept the minimum charge at 20% charge.
I've added another 1000wh (or 1kWh) to the battery by adding additional cells in parallel, otherwise I'd be stressing the cells too much (more than the 10A which they are rated for at peak load).
Together this is about 6.2 or 6.3kwh which should be enough for the 64 kilometers desired range but I guess I'll find that out once I actually attempt the ride for the first time ^^
As for the layout of the final battery (26s22p) I might go with two blocks of 13s22p and connect these in series as to make it easier to fit them into the frame. Any suggestions on this matter this would be super helpful!
Also haven't decided on the battery box yet. I'm thinking of creating a see-through plexiglass encasing (CNC'ed) because I really like the idea of seeing the "insides" of the systems that run the motorcycle. Also the see-through aspect could be helpful for visually checking for faults and for explaining the system to others.
Controller
Kelly Sinosoidal Controller KLS96501-8080HKelly Sinosoidal Controller KLS96501-8080H
This comes with the QS Motors conversion kit I'm planning on buying. It allows regen and is programmable. Also it allows for the nominal and peak amperage the system will produce.
BMS
To be decided. Any help with this would be much appreciated! It's gotta be compatible with both the temp battery (26s4p) and the final battery (26s22p or 2 times 13s22p). I have found some interesting options but I'm not quite sure yet which one to choose. Also some of them come with communications and a main relay but I'm not sure what this is for. It definitely needs to be balancing the cells either individually or per group (parallel) to ensure long battery health. Feel free to enlighten me on this!
DC-DC converter
Not sure yet what to do with this. If I hook up a DC-DC converter from the main 96v battery to power the 12v system on the bike, I'm thinking I might be in trouble when, during the ride, the main system shuts down (for whatever reason) and I'll be left without lights or gauges. Would it be better to create a dedicated 12v battery for this system and charge it separately from the main battery or through the main battery? If anyone could chip in, that'd be awesome!
I'm probably missing half of the required components to get it running but I think these are the main ones. As for how to hook all of this up, that's for finding out once we get all the components together and assembling them in a test-setup. This is also where the knowledge of my colleague is going to be very helpful. After this phase the plan is to add everything to the frame and go for a first test drive.
I'll be updating this page regularly the coming months as the project progresses so stay tuned! All tips and suggestions are super welcome! Thanks!!
I'm about to start a conversion project with the help of a colleague from work. We're about to electrify an old Honda CB1 motorcycle (or CB400F in other markets). The main purpose of the motorcycle is for driving the distance between my hometown Zwolle (the Netherlands) and the eastern part of the country, which is where my parents and girlfriend live. I'm going to use the motorcycle only on days where conditions are "good" i.e. not too cold and no rain / wet roads. As to the 'why' of the project: I'm stoked about electric vehicles and I've got a passion for riding motorcycles. These two combined along with the desire to learn more about the underlying technology of EV's is why I'm doing this! As for a little bit more on my background: I'm 29 years old with an engineering degree in logistics. I didn't have any meaningful experience with electrical systems before I started researching relevant topics for this project but thanks to the help of a colleague (who's an electrical engineer) and raw dedication I'm feeling confident this project will be a success!
So here is what I have in mind for the motorcycle requirements:
Required range
64 kilometers (40 miles) minimum. I'll be driving on roads with mainly 80 km/h speed limit so I guess my average speed will be around 60 km/h on the above mentioned route.
Required top speed
90 km/h (56 mph) to overtake any slow vehicles (faster is bonus)
Required acceleration
0 - 90 km/h (0 - 56 mph) in 10-13 seconds (quicker is bonus)
Charging
Since the motorcycle won't be for making long distance trips (I'm building it mainly for a specific route) I decided to go with the slow charging option (regular 220v 15A socket at home).
Weight
Haven't calculated the exact weight yet but I'm thinking the electric motorcycle (including myself driving it) will weigh around 250 kilos (or 551 lbs).
To achieve these requirements I'm planning on using the following components:
Donor bike
Honda CB1 (or CB400F) from 1991. I'll add some pictures of it in the next post. I chose this bike because of the "open" frame which creates lots of space for the EV-components when the engine block is removed. Also it's a 400cc bike so it's probably lightweight (frame wise). Plus the colors, I love them!
Hubmotor
QS Motor 8000w rated hubmotor (16000watt peak according to their website) 17 inch. I hope the M18 axle it comes with will fit into the swingarm but I doubt it. This will probably require some machining (which I'll be outsourcing since I don't have any large machines myself).
Battery
6,2kWh (or thereabouts) made from lithium-ion 18650 cells. I already bought 106 pieces of new LG INR18650-M29 2850mAh - 10A cells to create a "temporary" 96V and 26s4p battery to get the motorcycle working (although I'll be limiting the hubmotor load to 1250w to avoid frying the battery). I'm doing it this way to create a working "showcase" of the motorcycle with which I think I can attract financial donations from fellow colleagues and friends. With these donations I'm upgrading the battery to 26s22p. By then I can use the full power of the hubmotor. Also I'll be using the Vruzend v2.1 modular battery kit to assemble the individuals cells into one battery. These are rated for 20A power draw per cell but according to my calculations I'll be drawing less than 10A per cell at peak load, both in the temp battery as well as in the final battery.
For the minium required kWh, I used the following calculation:
69wh * 64km = 4416wh <----- average consumption of energy per kilometer times kilometers of riding
then 4416 * 1.2 = 5299wh <----- since fully discharging the batteries is a bad idea I kept the minimum charge at 20% charge.
I've added another 1000wh (or 1kWh) to the battery by adding additional cells in parallel, otherwise I'd be stressing the cells too much (more than the 10A which they are rated for at peak load).
Together this is about 6.2 or 6.3kwh which should be enough for the 64 kilometers desired range but I guess I'll find that out once I actually attempt the ride for the first time ^^
As for the layout of the final battery (26s22p) I might go with two blocks of 13s22p and connect these in series as to make it easier to fit them into the frame. Any suggestions on this matter this would be super helpful!
Also haven't decided on the battery box yet. I'm thinking of creating a see-through plexiglass encasing (CNC'ed) because I really like the idea of seeing the "insides" of the systems that run the motorcycle. Also the see-through aspect could be helpful for visually checking for faults and for explaining the system to others.
Controller
Kelly Sinosoidal Controller KLS96501-8080HKelly Sinosoidal Controller KLS96501-8080H
This comes with the QS Motors conversion kit I'm planning on buying. It allows regen and is programmable. Also it allows for the nominal and peak amperage the system will produce.
BMS
To be decided. Any help with this would be much appreciated! It's gotta be compatible with both the temp battery (26s4p) and the final battery (26s22p or 2 times 13s22p). I have found some interesting options but I'm not quite sure yet which one to choose. Also some of them come with communications and a main relay but I'm not sure what this is for. It definitely needs to be balancing the cells either individually or per group (parallel) to ensure long battery health. Feel free to enlighten me on this!
DC-DC converter
Not sure yet what to do with this. If I hook up a DC-DC converter from the main 96v battery to power the 12v system on the bike, I'm thinking I might be in trouble when, during the ride, the main system shuts down (for whatever reason) and I'll be left without lights or gauges. Would it be better to create a dedicated 12v battery for this system and charge it separately from the main battery or through the main battery? If anyone could chip in, that'd be awesome!
I'm probably missing half of the required components to get it running but I think these are the main ones. As for how to hook all of this up, that's for finding out once we get all the components together and assembling them in a test-setup. This is also where the knowledge of my colleague is going to be very helpful. After this phase the plan is to add everything to the frame and go for a first test drive.
I'll be updating this page regularly the coming months as the project progresses so stay tuned! All tips and suggestions are super welcome! Thanks!!