Hi All,
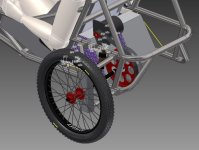
I am starting to design this 4 wheel, full suspension, fully electric bike and there is a whole lot I have questions about. First off the bike is primarily designed for disabled people. You will notice the left lever will be pull to go, push to brake. The right lever is pull to go right, push to go left. The reason for doing it this way is because those are movements I have most strength in. (I am a c6 quad SCI) I have a bunch of questions Ill just list bullet style:
-Swingarm or independent suspension? Ive been leaning towards a swingarm for stability and simplicity but the benefits of independent suspension I think would be that I could have one motor for each rear wheel which would provide propulsion redundancy in case of motor failure and also provide sort of a limited slip differential effect, but this is at the cost of simplicity and I suppose body roll in turns... What would you do?
-Motor. How much power would you give this thing? I am thinking 30mph would be plenty fast and maybe 10hp? I need a very reliable power plant. I don't want to get stranded! Please send me motor links! The buggy chassis before a motor and batteries should be under 100 lbs. Is there a way to do regenerative braking fairly easily?
Caster angle? This is a steering geometry question for the front suspension. How much caster angle should I give it?
I know I have a bunch more questions but this should get us started. Thanks for you help in advance!
Skye Parker
I am starting to design this 4 wheel, full suspension, fully electric bike and there is a whole lot I have questions about. First off the bike is primarily designed for disabled people. You will notice the left lever will be pull to go, push to brake. The right lever is pull to go right, push to go left. The reason for doing it this way is because those are movements I have most strength in. (I am a c6 quad SCI) I have a bunch of questions Ill just list bullet style:
-Swingarm or independent suspension? Ive been leaning towards a swingarm for stability and simplicity but the benefits of independent suspension I think would be that I could have one motor for each rear wheel which would provide propulsion redundancy in case of motor failure and also provide sort of a limited slip differential effect, but this is at the cost of simplicity and I suppose body roll in turns... What would you do?
-Motor. How much power would you give this thing? I am thinking 30mph would be plenty fast and maybe 10hp? I need a very reliable power plant. I don't want to get stranded! Please send me motor links! The buggy chassis before a motor and batteries should be under 100 lbs. Is there a way to do regenerative braking fairly easily?
Caster angle? This is a steering geometry question for the front suspension. How much caster angle should I give it?
I know I have a bunch more questions but this should get us started. Thanks for you help in advance!
Skye Parker





")