
Greeting All,
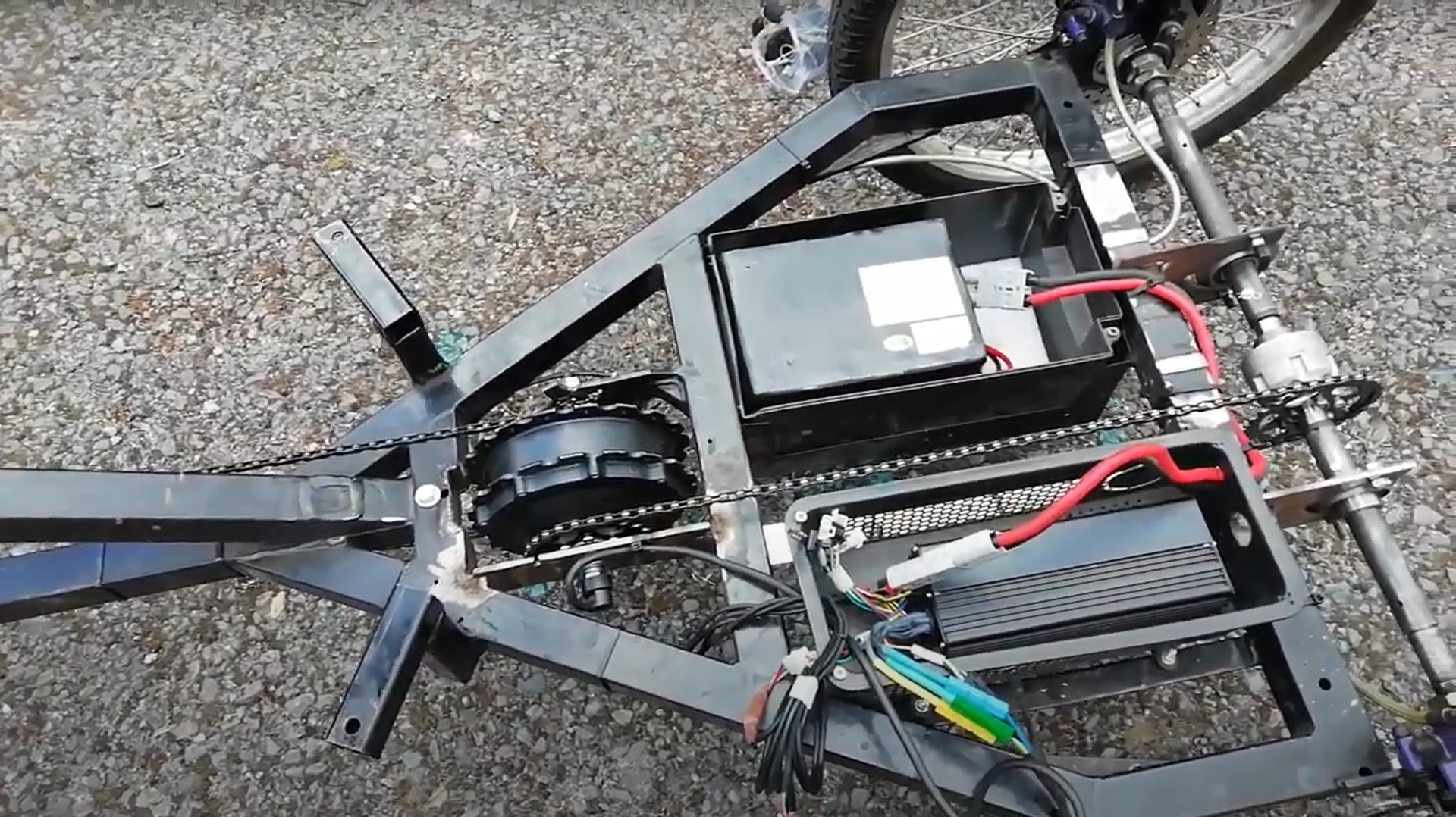
We have modified a cargo trike for heavy use carrying a soundsystem (see pics). The total weight of the trike with payload including the rider is max 350kg. We do not need/want it to go fast (12mph on the flat is ample) and we live in a fairly hilly city. As you can see from the pics, we're using a mid mounted hub motor driving a chain-drive differential on the rear axel via a sprocket on the disc rotor side of the hub motor. It has 20" wheels. We are using a thumb throttle.
Motor: MAC 12T w/ NSK bearings and upgraded planetary gears
Controller: Infineon 18FET
Computer: Cycle Analyst 3
On the first iteration of the trike (pictured below) I used a 24T sprocket at the hub motor and a 26T at the rear axel. It seemed to perform well under load but testing it on a short hill (fully loaded) we sheared off the internal pin that secures the non-moving part of the motor to the axel rendering the motor useless. It has now been repaired but I want to ensure we don't do it again, or burn out the motor. I realise (with hindsight reading this forum too late in my project) that: it may not have been the best choice of motor, we are using it beyond its intended use and that the 18FET controller may offer too much power and that the gear ratio was way off what it should have been.
Clearly the first thing to do it change the motor-axel gear ratio to give greater mechanical advantage. Without modifications to the frame, I can do 18T to 36T (2:1) which would almost double the MA. With further modifications we could go to 52T on the axel. I realise we would run slower. The second thing to do is set the CA3 (which we didn't have in iteration 1) for thermal roll back, throttle input/output and power limiting in order to protect the motor. Thirdly, cooling may be an issue - we are not using statorade or similar but could do. We could also build some heat sinks.
Question 1: would a 2:1 ratio be enough or should I just bite the bullet modify the frame? (I realise the answer might be 'test it and see')
Question 2: Can anyone advise on appropriate throttle input/output settings and/or power limits on the CA3 for this usage?
Many thanks in advance!

We have modified a cargo trike for heavy use carrying a soundsystem (see pics). The total weight of the trike with payload including the rider is max 350kg. We do not need/want it to go fast (12mph on the flat is ample) and we live in a fairly hilly city. As you can see from the pics, we're using a mid mounted hub motor driving a chain-drive differential on the rear axel via a sprocket on the disc rotor side of the hub motor. It has 20" wheels. We are using a thumb throttle.
Motor: MAC 12T w/ NSK bearings and upgraded planetary gears
Controller: Infineon 18FET
Computer: Cycle Analyst 3
On the first iteration of the trike (pictured below) I used a 24T sprocket at the hub motor and a 26T at the rear axel. It seemed to perform well under load but testing it on a short hill (fully loaded) we sheared off the internal pin that secures the non-moving part of the motor to the axel rendering the motor useless. It has now been repaired but I want to ensure we don't do it again, or burn out the motor. I realise (with hindsight reading this forum too late in my project) that: it may not have been the best choice of motor, we are using it beyond its intended use and that the 18FET controller may offer too much power and that the gear ratio was way off what it should have been.
Clearly the first thing to do it change the motor-axel gear ratio to give greater mechanical advantage. Without modifications to the frame, I can do 18T to 36T (2:1) which would almost double the MA. With further modifications we could go to 52T on the axel. I realise we would run slower. The second thing to do is set the CA3 (which we didn't have in iteration 1) for thermal roll back, throttle input/output and power limiting in order to protect the motor. Thirdly, cooling may be an issue - we are not using statorade or similar but could do. We could also build some heat sinks.
Question 1: would a 2:1 ratio be enough or should I just bite the bullet modify the frame? (I realise the answer might be 'test it and see')
Question 2: Can anyone advise on appropriate throttle input/output settings and/or power limits on the CA3 for this usage?
Many thanks in advance!


