Wheazel
10 kW
I have plans to refine my tilting trike winter bike concept later this year and I am starting to put together the parts I need.
The bike will be a more comfortable tilting bike with cargobox, but instead of 3 wheels as my trike, I will go 4 wheels to keep the straight line trackcount down to 2.
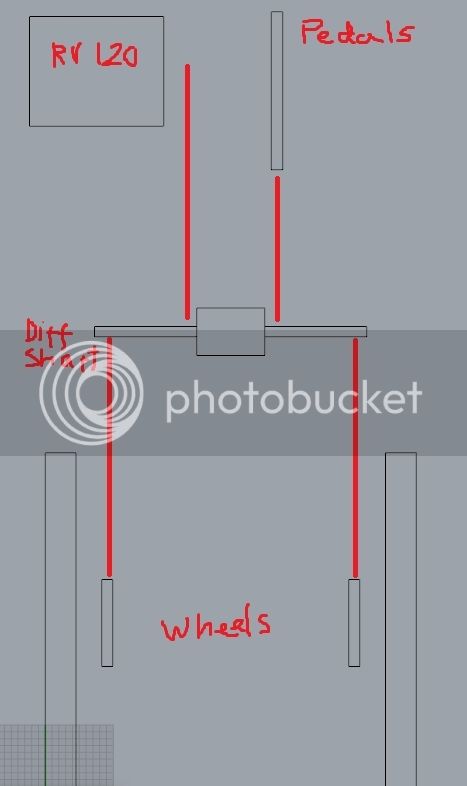
The motor I will use is the Revolt 120pro I first had on my cargobike. Will probably get my hands on a samagaga diff aswell unless they cost too much.
Right now I have a noname controller (sold by Revolt) for my tilttrike together with an older Revolt 100. This one is a basic 40A controller.
I use a CAv3 and a shunt together with it. Problem is, it doesnt have any sensors, and the rv120pro has.
Since I am going to have the battery detachable from this bike, unlike the cargobike, I will not be going the Adaptto route for this project.
I like the CA and plan to keep it as is.
What would be sensible controller choices in this case? Anything 50A+ and 12s should do.
I guess I could get a controller with CA connection instead of using the shunt when I am at it.
The project will get a buildthread when its time.
I spend some time on the project now and then, and currently I am debating solutions to speedmatch human input to motor input on the differential shaft.
Also working on the overall design. Thanks for reading.
The bike will be a more comfortable tilting bike with cargobox, but instead of 3 wheels as my trike, I will go 4 wheels to keep the straight line trackcount down to 2.
The motor I will use is the Revolt 120pro I first had on my cargobike. Will probably get my hands on a samagaga diff aswell unless they cost too much.
Right now I have a noname controller (sold by Revolt) for my tilttrike together with an older Revolt 100. This one is a basic 40A controller.
I use a CAv3 and a shunt together with it. Problem is, it doesnt have any sensors, and the rv120pro has.
Since I am going to have the battery detachable from this bike, unlike the cargobike, I will not be going the Adaptto route for this project.
I like the CA and plan to keep it as is.
What would be sensible controller choices in this case? Anything 50A+ and 12s should do.
I guess I could get a controller with CA connection instead of using the shunt when I am at it.
The project will get a buildthread when its time.
I spend some time on the project now and then, and currently I am debating solutions to speedmatch human input to motor input on the differential shaft.
Also working on the overall design. Thanks for reading.
")