
glenn0010
100 W
Hi Guys,
I have a thread where I created the first really expensive bulky version of a brushless motor controller but it worked.
[youtube]0XuylPevH7s[/youtube]
The thread can be found here : https://endless-sphere.com/forums/viewtopic.php?f=3&t=70870&start=75
Now I want to move on to version 2. I will be doing this for my final year project (Bachelor's Degree in Electronics and Control Engineering) My main aim is to make the circuit compact and cheap and also add current and temperature control.
In my first controller I used isolated DC/DC converters for the mosfet drive. However these were 6 Euros each (x6 =36euros) so that is quite expensive. In the second version I would like to use IR2113. I have never used this configuration before so if anyone has some tips they would be appreciated.
I know that you can not run 100% duty cycle using the gate drives, however for a BLDC controller one of the phases has to be off at any given time so hopefully the capacitor has enough time to charge and hopefully can give me 100% duty cycle when it is required to be on. I am going to use a switching frequency of 30kHz and below is the circuit diagram
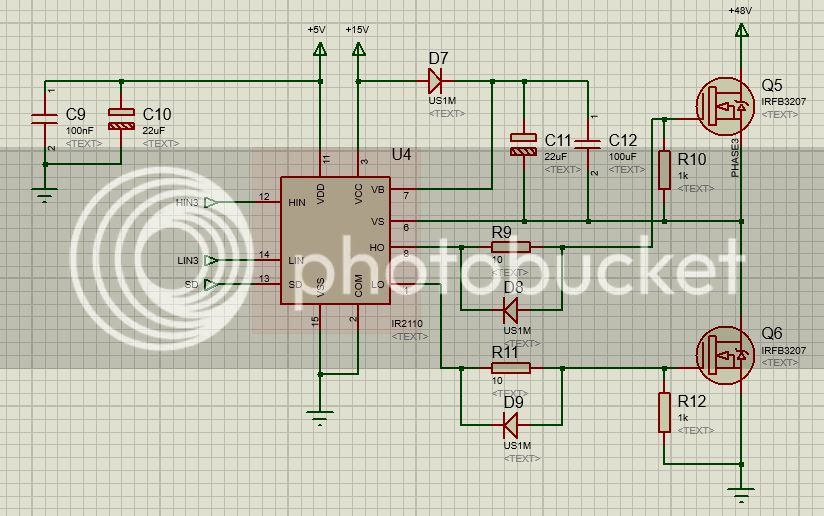
I think I have sized the drive capacitors appropriately for the switching frequency correct?
I also plan on testing the circuit and then adding a snubber circuit to remove voltage spikes.
Any feedback?
I plan on starting this project in about 2 months after I finish this semester.
Regards Glenn
I have a thread where I created the first really expensive bulky version of a brushless motor controller but it worked.
[youtube]0XuylPevH7s[/youtube]
The thread can be found here : https://endless-sphere.com/forums/viewtopic.php?f=3&t=70870&start=75
Now I want to move on to version 2. I will be doing this for my final year project (Bachelor's Degree in Electronics and Control Engineering) My main aim is to make the circuit compact and cheap and also add current and temperature control.
In my first controller I used isolated DC/DC converters for the mosfet drive. However these were 6 Euros each (x6 =36euros) so that is quite expensive. In the second version I would like to use IR2113. I have never used this configuration before so if anyone has some tips they would be appreciated.
I know that you can not run 100% duty cycle using the gate drives, however for a BLDC controller one of the phases has to be off at any given time so hopefully the capacitor has enough time to charge and hopefully can give me 100% duty cycle when it is required to be on. I am going to use a switching frequency of 30kHz and below is the circuit diagram
I think I have sized the drive capacitors appropriately for the switching frequency correct?
I also plan on testing the circuit and then adding a snubber circuit to remove voltage spikes.
Any feedback?
I plan on starting this project in about 2 months after I finish this semester.
Regards Glenn


