bobc
10 kW
I'm going to make one of these, it's just too cool not to.....
OK this leads on from a post miles made with a patent for some harmonic "gearboxes".
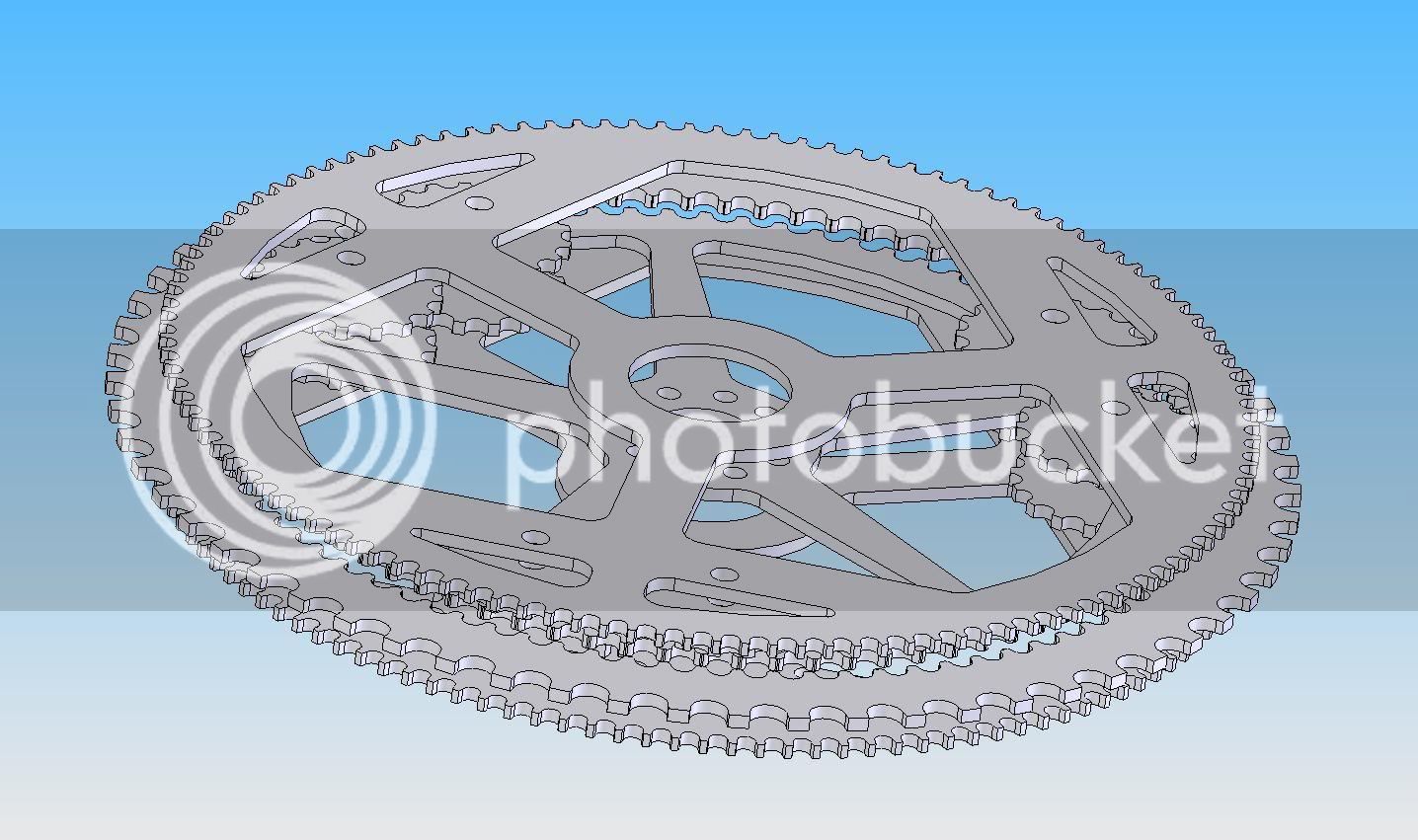
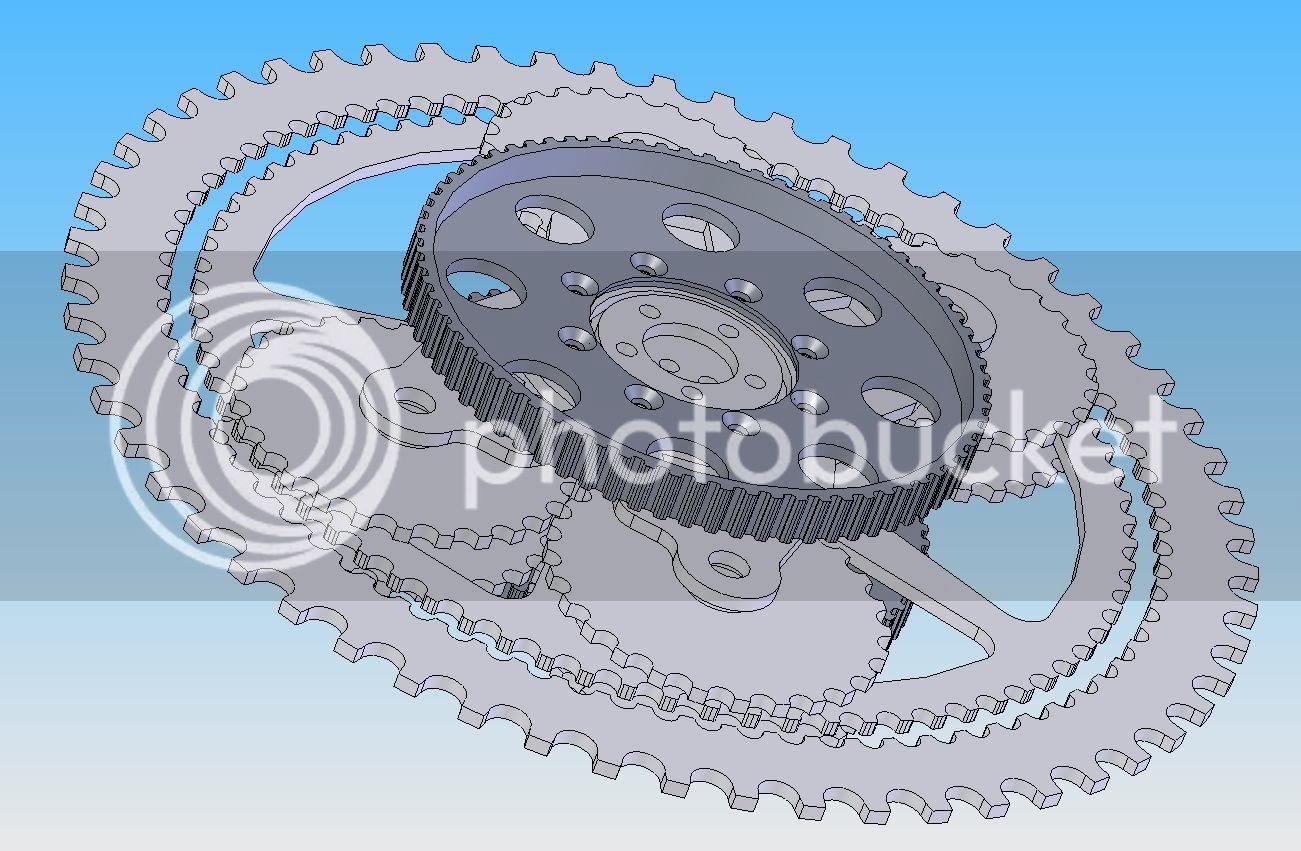
The picture is an assembly that replaces the chainring on the cranks; pedal drive enters via the "sun wheel", electric drive via the 2 outer "planet carrier" wheels.
The output ring rests on a triplex chain which sits in the middle.
Why are the planet wheels in pairs? because it's not possible to tension the triplex chain adequately with single planets; - I don't know if anyone has ever done this "binary planet" chain drive harmonic gearbox before... I had to have 3 sets of planets as these are what locate the big output ring.
The harmonic gearbox part gives about 14:1 reduction; with a further large (up to another 15:1) reduction available to an RC motor outrunner, an effective 70rpm cadence on the pedals would be matched by a 70*14*15 rpm motor - that's 15k rpm: the thorny old issue of getting sufficient reduction to the cranks is solved!
The output reacts against the pedals, so this would not be suitable for much over 500W; however as the bike cannot go without pedal pressure, it may meet the EC "pedelec" requirements (?)
I'll get the dxf's to the laser cutters over the next few days - I just have to decide whether to go stainless or mild: - I'm going to have to tap some 3mm holes & don't fancy that in stainless.....
OK this leads on from a post miles made with a patent for some harmonic "gearboxes".
The picture is an assembly that replaces the chainring on the cranks; pedal drive enters via the "sun wheel", electric drive via the 2 outer "planet carrier" wheels.
The output ring rests on a triplex chain which sits in the middle.
Why are the planet wheels in pairs? because it's not possible to tension the triplex chain adequately with single planets; - I don't know if anyone has ever done this "binary planet" chain drive harmonic gearbox before... I had to have 3 sets of planets as these are what locate the big output ring.
The harmonic gearbox part gives about 14:1 reduction; with a further large (up to another 15:1) reduction available to an RC motor outrunner, an effective 70rpm cadence on the pedals would be matched by a 70*14*15 rpm motor - that's 15k rpm: the thorny old issue of getting sufficient reduction to the cranks is solved!
The output reacts against the pedals, so this would not be suitable for much over 500W; however as the bike cannot go without pedal pressure, it may meet the EC "pedelec" requirements (?)
I'll get the dxf's to the laser cutters over the next few days - I just have to decide whether to go stainless or mild: - I'm going to have to tap some 3mm holes & don't fancy that in stainless.....