Miles, I'm putting it in this thread because I got the idea from you. Just a minor variation, but this version is "doable" for me. The entire right-side pedal drive is stock. Just found out the GNG motor is reverse-able. So is John in CRs mini-monster.
A recent poster was asking about having a very low gear for off-road, and also a fairly high top-speed for the street. A 3-speed Nexus-as-a-jackshaft might break teeth at 40-MPH power levels. I began trying to remember info from 2-speed discussions. I have been impressed by two builders who ended up using chain and external sprockets for high power. Very robust when using #415 or #219. Since all FWs are straight in-line (unlike BB-drives with one offset chainring), ENO is an option for the FWs.
I've never embraced the classic RD
long chain with an idler approach, but I've recently had second thoughts about a RD system using three chains and a jackshaft with 3 freewheels.

Most of the reduction is accomplished by the Left-Side-Drive from jackshaft to the rear wheel (which I had avoided due to the classic one-speed LSD), leaving reasonable sprocket sizes for the rest of the drive. Final drive on the left, two side-by-side RD chains on the right from the reverse-able motor to the jackshaft.
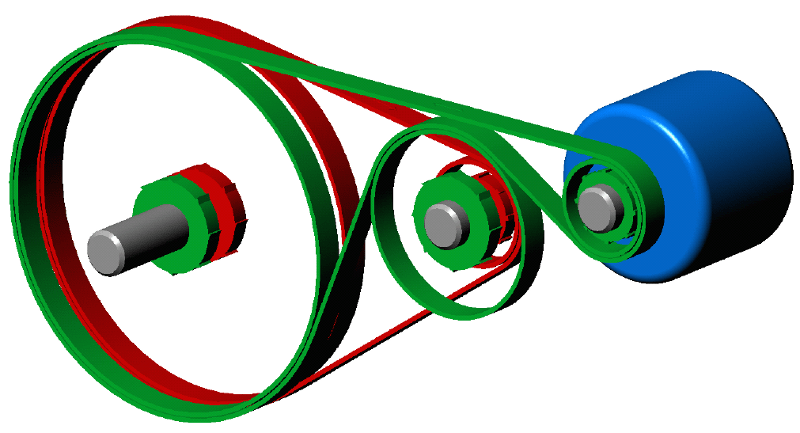
The
RED forward-motor gear is pretty simple self-explanatory. If using #25 or #219, the motor-sprocket could be very small and still have at least 11T.
The BLACK reverse-motor jackshaft gear is a Rassy-style with two idlers. I'd spec chain for the reverse-motor gear due to poor belt teeth engagement, but the rest could be belt-optional. Perhaps low gear should be belted so the high-RPMs would be quieter than chain, or the high gear could be belt for the higher tooth-engagement of the motor-pulley?
Anyways here's a graphic of the motor-reverse gear (*goes to get a beer, and then sit down to draw...comes back in a few minutes). Finished drawing, chose LOW gear for forward-motor, and HIGH gear for reverse, but they could easily be the opposite.

Enough chain-tooth engagement if I eliminate one of the idlers?

Found a sprocket diameter calculator, very easy, type in pitch and tooth-count (bike chain is 1/2" pitch, #219/#25 is 1/4-inch)
http://www.rbracing-rsr.com/calcsprocketdiam.html
For a larger 2-speed, that has some room for adjusting the difference between the two gears, a
4:1 as low (64T:16T), and a
2:1 in high (32T:16T). Changing the large sprocket in low will reduce the difference between them, both the 16T are ENO freewheels due to their ability to handle higher power, 16T is their lowest tooth-count. Chain is #415.
In order to make a similar gearbox that is as small as possible, the FWs will be moved to the output shaft. Low is an 11T sprocket to a 22T ENO, and high is a 16T sprocket to a 16T ENO. [
2:1 and 1:1]. I don't want to make the drive sprocket for low smaller than 11T, so the 16T in high can be made smaller to bring the ratios closer together. If low is the max 16T:11T, the closest ratios are [
2:1 and 1.45:1]
Sprocket diameters in #41 bike chain (because we are using ENO FWs):
11T = 1.77"
16T = 2.56"
22T = 3.51"
32T = 5.10"
64T = 10.19"
The large-range trans would be about 12-inches by 24-inches tall (possibly 4 inches wide). The smaller trans would also be about 4-inches wide, 5 inches front to back, and 9 inches tall.
Edit: since smaller sprockets are louder, it may be beneficial to make the lowest gear be larger sprockets (small idlers)

")


