Hi,
I've been working on converting a Piaggio Ape 50 Tricycle to electric, but I can't get the motor to run without stuttering and making banging noises...
My set up is as follow:
- 72v 70Ah 20s Lithium Battery with 300A "Ant BMS/Smart BMS" with display.
- Revolt RV-160 Pro motor
- Kelly KLS-7275H controller
I originally planned on using Adaptto Max-E controller, which I bought and burned after too many unsuccessful attempts to get the motor spinning. I then got a Kelly KLS-7275H controller.
Now I'm trying with the Kelly and I'm getting similar results: Motor doesn't spin when I apply throttle, it only makes whining noises or, depending on rotor position, makes about a quarter turn and stops violently. The controller gets into "reset error" and applies current to the motor about once every second, until I release the throttle.I've tried Kelly "auto identification" but motor barely moves and make a subtle noise every second. I've also tried all 36 phase/hall combination, without success.
Note that when I was using the Adaptto and running the "auto-detect" I was having "hall error e1".
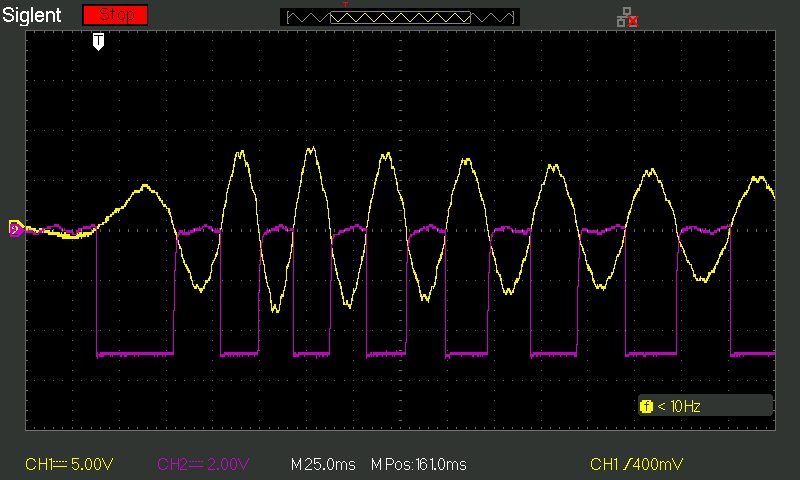
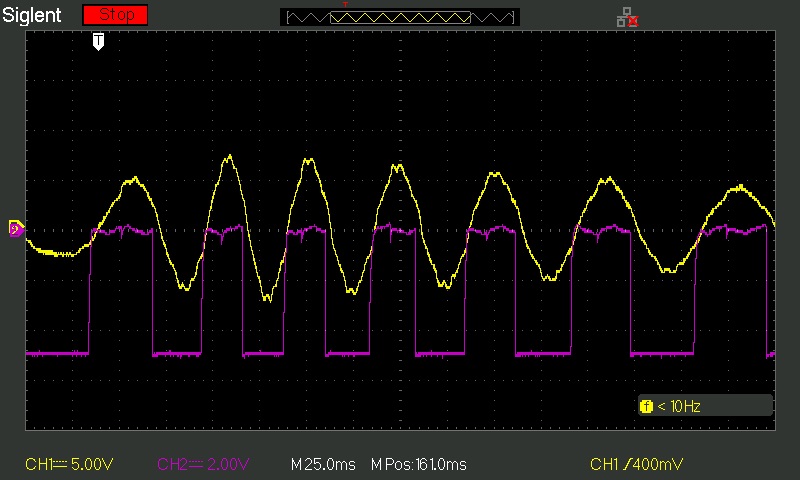
Hall sensors don't seem to be the problem, as when I turn the motor I read 100>110>010>011>001... I've also tested hall sensors output voltage and supply voltage as this link suggests (http://www.revolt.org.il/how-to-test-the-hall-sensors/). I get either 0v or 5V (when measuring against supply voltage, not ground)
I've tried everything that is in my power, read each and every topic related to my setup, but I can't find a solution.
Here are the controller parameters (Bluetooth android app)
https://docs.google.com/document/d/1djSpoFvBWuvMgZ8uG54dFnfqaXjpJb1wXqHND6hwhgk/edit?usp=sharing
And here is a picture of the Ape 50:

Thank you !
I've been working on converting a Piaggio Ape 50 Tricycle to electric, but I can't get the motor to run without stuttering and making banging noises...
My set up is as follow:
- 72v 70Ah 20s Lithium Battery with 300A "Ant BMS/Smart BMS" with display.
- Revolt RV-160 Pro motor
- Kelly KLS-7275H controller
I originally planned on using Adaptto Max-E controller, which I bought and burned after too many unsuccessful attempts to get the motor spinning. I then got a Kelly KLS-7275H controller.
Now I'm trying with the Kelly and I'm getting similar results: Motor doesn't spin when I apply throttle, it only makes whining noises or, depending on rotor position, makes about a quarter turn and stops violently. The controller gets into "reset error" and applies current to the motor about once every second, until I release the throttle.I've tried Kelly "auto identification" but motor barely moves and make a subtle noise every second. I've also tried all 36 phase/hall combination, without success.
Note that when I was using the Adaptto and running the "auto-detect" I was having "hall error e1".
Hall sensors don't seem to be the problem, as when I turn the motor I read 100>110>010>011>001... I've also tested hall sensors output voltage and supply voltage as this link suggests (http://www.revolt.org.il/how-to-test-the-hall-sensors/). I get either 0v or 5V (when measuring against supply voltage, not ground)
I've tried everything that is in my power, read each and every topic related to my setup, but I can't find a solution.
Here are the controller parameters (Bluetooth android app)
https://docs.google.com/document/d/1djSpoFvBWuvMgZ8uG54dFnfqaXjpJb1wXqHND6hwhgk/edit?usp=sharing
And here is a picture of the Ape 50:
Thank you !