Please, please, please, Will someone help me!
I have changed a lot of different settings one at a time. With the torque sensor calibrated and enabled it does work as good but different than it did with it disabled. I have it set up so my maximum output is 850 watts.
To start from a dead stop the crank has to rotate a half a turn and then it shutters for another half or full turn and then it goes.
If I enable startup boost or, and assist without pedal rotation. I have to pedal 2 to 3 rotations for the power assist to turn on. The settings are backward so disable means enable, and enable means disable.
I find myself shifting a lot more than I use to and in a lot of lower gears at the same speed at a lot higher cadence than I used to.
One thing that I notice no matter what I did with the setting, is that the watts can only go as high as the current cadence.
Example in rounded numbers pedaling as hard as you can in a high gear, 10 cadence has a maximum of only 100 watts, 20 cadence has a maximum of 200 watts, 30 cadence has a maximum of 300 watts, 40 cadence has a maximum of 400 watts, 50 cadence has a maximum of 500 watts, 60 cadence has a maximum of 600 watts, then 70-100 cadence has a maximum of 850 watts. It does this in both power and torque modes and with torque sensor calibration enabled and disabled.
The only thing I can think of is that this version 1.0.0 of firmware was set up to be safe on the blue gear. To me this is the way a Bafang’s or cadence power assist works, the faster you pedal the more power it has.
Todays Ride,
I only changed 2 settings, I tried both torque and power along with torque sensor calibration, enable and disable.
Each of the 4 possible settings had their own personality but none was better than the other.
I didn’t do all the stop and starts that I did last time, I just tried to enjoy my ride.
Here Is what I discovered,
From a stop to 30 cadence it has less power than version 20 for sure.
From 30 to 40 cadence it has a small amount less power than version 20.
From 40 to 60 it has almost the same amount of power as version 20.
From 60 to 100 it has a lot more power than version 20.
Version 20 for the LCD3 works much better at lower cadence, you get much more torque at a much lower cadence.
It takes off from the dead stop better. This is the way a torque sensor power assist is designed to work!
Does anyone out there know of a setting that will change this so you get more torque & power at a lower cadence and not only at higher cadence???
And to take off without rotation???
If it’s not possible to get more torque and power at a lower cadence and take off without rotation with version 1.0.0?
Then will someone rewrite the code to offer more torque and power at a lower cadence and add take off without rotation and make a new version?
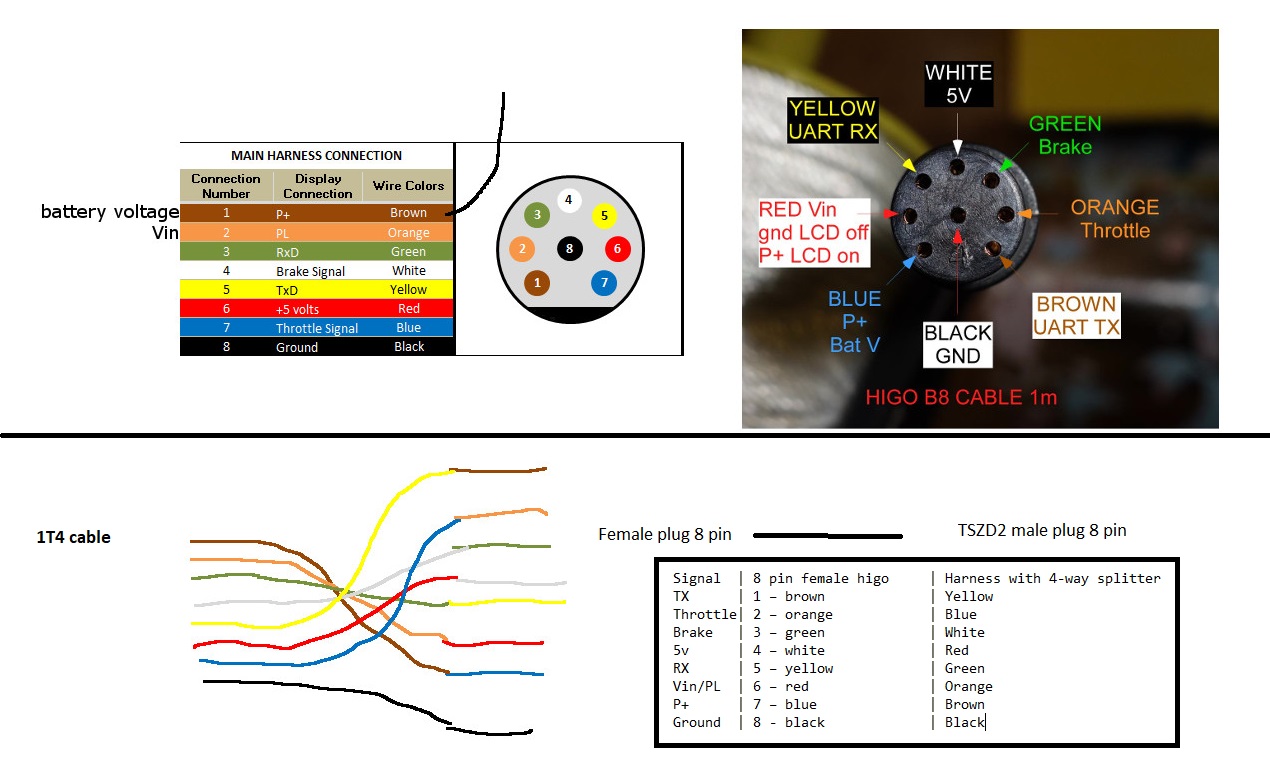
I have attached my CHEAT SHEET with some of my settings and also photos of my screen at the end of the ride.
Please, please, please, Will someone help me!
Thanks,
Jeff
View attachment SHORT Handcycle, Basic TSDZ2 motor controller firmware version 1.0.0.rtf






 . I opened a separate thread, maybe you could help me diagnosing why my motor suddenly doesn't work anymore after adding a temperature sensor ? (Display oddly shows : Error 3 : Torque Fault)
. I opened a separate thread, maybe you could help me diagnosing why my motor suddenly doesn't work anymore after adding a temperature sensor ? (Display oddly shows : Error 3 : Torque Fault)