
adrian_sm
1 MW
World's Worst Dyno v1 has been upgraded. To include:
- torque measurement
- RPM measurement
- variable load, via regen
Basic setup.
- drive motor is fixed to an angle bracket
- driven/load motor is floating on the pillow block bearing on its axle, coupled axially to the drive motor, and the rotation it taken by a torque arm
- the torque arm is simply bolted to the stator, 200mm long, and rests on the kitchen scales via a blob of blue tack to meaure the force
- RPM readings are via the flux leaking out of a motor, a hall sensor stolen from a cheap throttle, and a cheap oscilloscope
- cycle analyst and watt meter are used to measure the input power, and regen power
- IR thermometer can monitor temperatures.
Purpose of Worlds Worst Dyno v2
- Understand more about the continuous power/torque/thermal limits of small RC motors.






The parts list is:
- mounting board
- three steel angle brackets
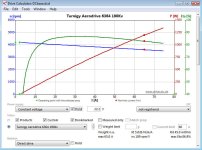
- Drive Motor: Turnigy Aerodrive SK3 - 6364-190kv Brushless Outrunner Motor
- Load Motor: C8085-250kv
- Drive ESC: Turnigy Brushless ESC 85A w/ 5A SBEC
- Regen Controller: 6fet sensorless EB306/XieChang/Keywin/eCrazyman controller (using IRFB3006 fets)
- 2x 12mm KFL001 FL001 Pillow Block Bearing Flange Block Bearing
- BF 8mm X 12mm CNC Flexible Plum Coupling Shaft Coupler D25L30
- servo tester (ESC throttle)
- 5k pot, and switch for regen controller throttle and to enable regen.
- IR Thermometer
- hall sensor from a $2 throttle and oscilloscope to measure motor RPM
- Cycle Analyst for regen controller volts and watts
- Turnigy Watt Meter for drive motor watts measurment
- kitchen scales to measure the torque load
- blue tack to keep torque arm in contact with kitchen scales, and dampen load
- 24v 600w Meanwell Powersupply
- miscelaneous wires and screws
Future Upgrades:
- lightbulb load bank for greater variety in torque loads
- datalogging RPM, torque, volts, amps in, regen power
Results so far:
- the SK3 6364-190kv was approx. 88% efficient for a 1.38Nm load @ 3850 rpm.
- torque measurement
- RPM measurement
- variable load, via regen
Basic setup.
- drive motor is fixed to an angle bracket
- driven/load motor is floating on the pillow block bearing on its axle, coupled axially to the drive motor, and the rotation it taken by a torque arm
- the torque arm is simply bolted to the stator, 200mm long, and rests on the kitchen scales via a blob of blue tack to meaure the force
- RPM readings are via the flux leaking out of a motor, a hall sensor stolen from a cheap throttle, and a cheap oscilloscope
- cycle analyst and watt meter are used to measure the input power, and regen power
- IR thermometer can monitor temperatures.
Purpose of Worlds Worst Dyno v2
- Understand more about the continuous power/torque/thermal limits of small RC motors.
The parts list is:
- mounting board
- three steel angle brackets
- Drive Motor: Turnigy Aerodrive SK3 - 6364-190kv Brushless Outrunner Motor
- Load Motor: C8085-250kv
- Drive ESC: Turnigy Brushless ESC 85A w/ 5A SBEC
- Regen Controller: 6fet sensorless EB306/XieChang/Keywin/eCrazyman controller (using IRFB3006 fets)
- 2x 12mm KFL001 FL001 Pillow Block Bearing Flange Block Bearing
- BF 8mm X 12mm CNC Flexible Plum Coupling Shaft Coupler D25L30
- servo tester (ESC throttle)
- 5k pot, and switch for regen controller throttle and to enable regen.
- IR Thermometer
- hall sensor from a $2 throttle and oscilloscope to measure motor RPM
- Cycle Analyst for regen controller volts and watts
- Turnigy Watt Meter for drive motor watts measurment
- kitchen scales to measure the torque load
- blue tack to keep torque arm in contact with kitchen scales, and dampen load
- 24v 600w Meanwell Powersupply
- miscelaneous wires and screws
Future Upgrades:
- lightbulb load bank for greater variety in torque loads
- datalogging RPM, torque, volts, amps in, regen power
Results so far:
- the SK3 6364-190kv was approx. 88% efficient for a 1.38Nm load @ 3850 rpm.

.JPG")
.JPG")
 EB306 Strong Regen.JPG")

.JPG")