casainho
10 GW
- Joined
- Feb 14, 2011
- Messages
- 6,045
Project status as of 2020.01.17: full working and tested, other developers did join and users are very happy, including online shops selling the TSDZ2 motor and 850C displays with our firmware installed.
About the TSDZ2 Flexible OpenSource firmware/embedded software
This OpenSource firmware adds advanced features and customization that are usually only available on expensive motors from big brands. The motor is driven more efficiently (FOC) making it stronger and uses less battery energy. It also allows the use more advanced displays like the 850C color display and SW102 Bluetooth display.
The displays show advanced information like battery voltage, rider pedal power in watts, motor temperature, etc. All configuration is available to the user via the display!
The development of this firmware started on March 2018 by casainho and 6 months after, Jabalat an experienced user of TSDZ2 and ebikes, did a very positive review on his Youtube channel. The development is active and is being done for free by the community of users; some of these developers work professionally developing this type of technology for very well known companies.
Project page: https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki
---
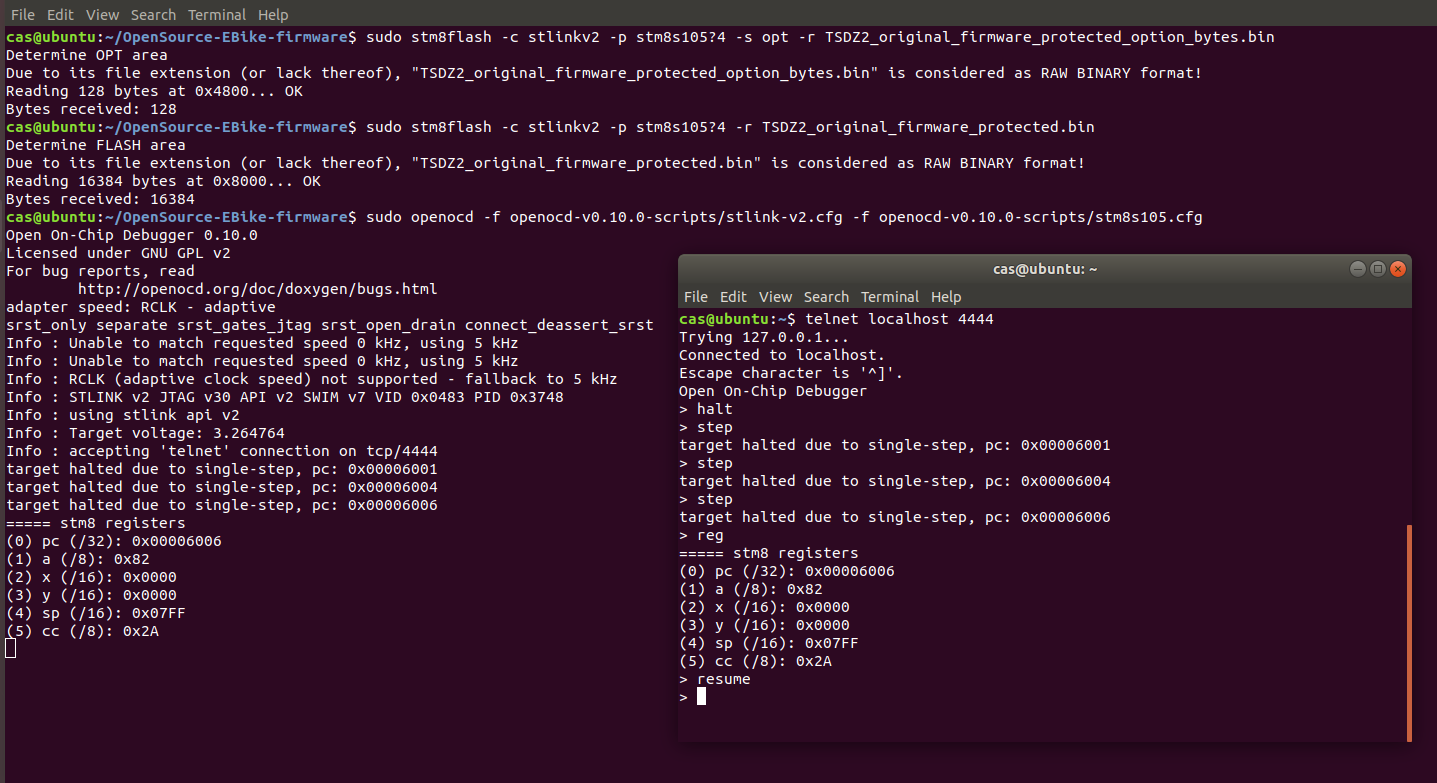
With the same spirit of Flexible OpenSource firmware for BMSBattery S/Kunteng KT motor controllers (0.25kW up to 5kW), that I started 1 year ago (on 25 April 2017), I just started the research for development of OpenSource firmware for TSDZ2 motor controller -- my notes are here:
https://opensourceebikefirmware.bitbucket.io/development_tsdz2/About_Tongsheng_TSDZ2_mid_drive_motors.html
About the TSDZ2 Flexible OpenSource firmware/embedded software
This OpenSource firmware adds advanced features and customization that are usually only available on expensive motors from big brands. The motor is driven more efficiently (FOC) making it stronger and uses less battery energy. It also allows the use more advanced displays like the 850C color display and SW102 Bluetooth display.
The displays show advanced information like battery voltage, rider pedal power in watts, motor temperature, etc. All configuration is available to the user via the display!
The development of this firmware started on March 2018 by casainho and 6 months after, Jabalat an experienced user of TSDZ2 and ebikes, did a very positive review on his Youtube channel. The development is active and is being done for free by the community of users; some of these developers work professionally developing this type of technology for very well known companies.
Project page: https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki
---
With the same spirit of Flexible OpenSource firmware for BMSBattery S/Kunteng KT motor controllers (0.25kW up to 5kW), that I started 1 year ago (on 25 April 2017), I just started the research for development of OpenSource firmware for TSDZ2 motor controller -- my notes are here:
https://opensourceebikefirmware.bitbucket.io/development_tsdz2/About_Tongsheng_TSDZ2_mid_drive_motors.html
")