johnrobholmes
10 MW
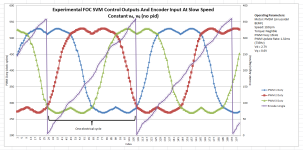
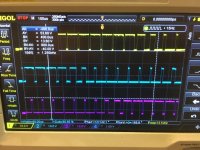
I've been having some lively discussions over a new controller in the RC realm that is claiming closed loop FOC. By all accounts, I can't make it fit what I know to be FOC. Mainly, when looking at the voltage from the controller, it is quite trapezoidal in shape. The area under the curve has a linear rise and fall, and at half throttle spends 1/3 of the time at full duty and 1/3 of the time at 0 duty. There is a 14khz AC waveform on top of the typical commutation, in order to lock in the motor speed to the drive frequency. The motor is a nearly perfect sine bEMF, so the controller output should be close to a sine wave with the typical dips in the middle where reluctance is at min/max. So far, I have quite a few engineers in agreement that this is either a poor attempt at FOC, or not FOC at all. They are using an encoder on the motor, but encoder doesn't = FOC.
What say you? Any more data I can gather short of destroying the controller?
What say you? Any more data I can gather short of destroying the controller?