
Recently, it looks like there has been kind of a demand for 2 wheel boards, with the speedboard and the roobster making some traction. I like the concepts, but there are some things that I would do differently. For one, I prefer the size of the dirtsurfer's wheels over the speedboard. Larger wheels would hopefully reduce amp draw on softer terrain.
Also, the speedboard and the roobster sit at almost axle height. I'd hope that lowering and widening the deck would decrease the need to mongo push, but we'll see. I think it'd be great to be able to push the board up to speed to save some battery.
Interestingly, all boards have different caster angles. The roobster has a positive caster angle, the speedboard has a neutral one with a virtual pivot point, and the dirtsurfer negative. The DIY version that I saw on here had a positive caster angle as well. I designed this one with a positive caster because it incorporates itself into the design better and has some benefits for high speed and cornering.
I also added suspension. Who doesn't like suspension? I'm planning on having about 4 inches of clearance with 1.5 inches travel. Should be plenty for most things.
And lastly, I'd add disc brakes with a wired throttle. I'm just not a fan of the idea that I could end up at the bottom of a hill to just realize that my remote lost connection, and then T-bone a bus. I do understand the appeal of a wireless remote, but it's just not for me.
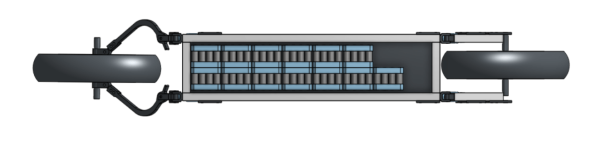
The deck rails are 1 inch aluminum square tubing. This gives me just enough space to use 21700s for a 13s4p battery. Plus it's cheap.
Unfortunately, I will have to find a service to machine some of the hinges for me, which may be waaay out of my budget. All I have is a hand drill and an angle grinder. I'm by no means a mechanical engineer, so I wanted to hear what you guys had to say about the design.
Other proposed stats:
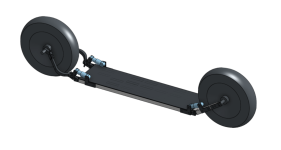
Wheelbase: about 52 inches
Deck length: 33 inches
Hub motor: 750w geared hub motor
Tires: 16x4 (actual diameter 19")
Suspension: cheap 100mm scooter shocks
Deck material: probably aluminum, carbon fiber is not in my budget
Hinge material: 1018 steel
Also, the speedboard and the roobster sit at almost axle height. I'd hope that lowering and widening the deck would decrease the need to mongo push, but we'll see. I think it'd be great to be able to push the board up to speed to save some battery.
Interestingly, all boards have different caster angles. The roobster has a positive caster angle, the speedboard has a neutral one with a virtual pivot point, and the dirtsurfer negative. The DIY version that I saw on here had a positive caster angle as well. I designed this one with a positive caster because it incorporates itself into the design better and has some benefits for high speed and cornering.
I also added suspension. Who doesn't like suspension? I'm planning on having about 4 inches of clearance with 1.5 inches travel. Should be plenty for most things.
And lastly, I'd add disc brakes with a wired throttle. I'm just not a fan of the idea that I could end up at the bottom of a hill to just realize that my remote lost connection, and then T-bone a bus. I do understand the appeal of a wireless remote, but it's just not for me.
The deck rails are 1 inch aluminum square tubing. This gives me just enough space to use 21700s for a 13s4p battery. Plus it's cheap.
Unfortunately, I will have to find a service to machine some of the hinges for me, which may be waaay out of my budget. All I have is a hand drill and an angle grinder. I'm by no means a mechanical engineer, so I wanted to hear what you guys had to say about the design.
Other proposed stats:
Wheelbase: about 52 inches
Deck length: 33 inches
Hub motor: 750w geared hub motor
Tires: 16x4 (actual diameter 19")
Suspension: cheap 100mm scooter shocks
Deck material: probably aluminum, carbon fiber is not in my budget
Hinge material: 1018 steel



")

