nechaus
100 kW
Hey guys, Thought id make this thread just in encase any of you were thinking about making a multirotor..
Hopefully this will help someone out and make it easier. (it's not that hard at all)
My goal from this build is to make a quadcopter X style, Beefy power... Fast speeds .. Acrobatic if I want.. or perfectly stable with long hovering times.
You would easily be able to mount a full size camera on this.
Low cost but pretty decent quality overall.
Component list.
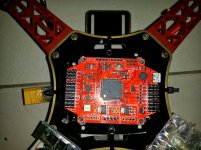
Frame, 450mm size from hobbyking, Its a DJI clone frame but this is the 3rd version.. seems quite robust.. great for a beginner or novice.
Link : http://hobbyking.com/hobbyking/store/__49725__Q450_V3_Glass_Fiber_Quadcopter_Frame_450mm_Integrated_PCB_Version.html
Motors , http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=18225 $60 for x4
Okay these motors are the minimum you would want.. You can go smaller like 28xx size but They do tend to get hot and if your system is not balanced one or 2 motors might work harder and get warmer when you fly acro.. with the bigger ones you have more head room.
So I found the 3530 to be a great motor for this frame.
(you do need to drill two extra hole on each motor mount to mount the motor directly to the frame.. you do not need to use the aluminium mount that comes with the motor.
Esc- 30 amp, Cheapest is the hobbyking series.. They will work.. I would strongly recommend getting ESC's with a Simonk Flash.. they cost around $13 from hobbyking..
- What is the simonk firmware? Its firmware to basically increase the response time of the esc from the flight controller. ( more stable flight)
Props, 10x4.5 props. example http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=25821 http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=25824
These props work well. they are cheap.. they break if you crash.. start with these and then go to carbon ..
-$20
Flight controller. $70
I have gone with the Multiwii pro, its cheap, comes with a gps.
http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=39333
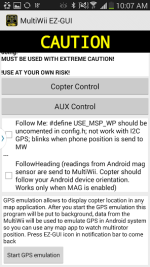
Bluetooth module - for close range pc/phone connectivity. $9
http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=55126
All up total cost about $230-$240- ( if you did not want gps and just an acro quad, -$50)
You would also need to get a transmitter, you can go with a cheap hk 6 channel one for $30 or get a turnigy 9x for about $70..
you will get around 500 meters with the hk tx rx.. turnigy maybe 1km . but the turnigy can be upgrade for long range gear.
And finally the battery, you could fly with a 3ah battery for acro flight... lower weight.. you could use something the size of 8ah
Both need to be 3s, 4s will be to much for this propeller size..
1100kv + 3s + 10-4.5 props is a good combination. With 8ah you would get upto 15 mins hovering time which is not to bad for the power it has.
Keep in mind this quadcopter will be very powerful for acro flight as well...
Hopefully this will help someone out and make it easier. (it's not that hard at all)
My goal from this build is to make a quadcopter X style, Beefy power... Fast speeds .. Acrobatic if I want.. or perfectly stable with long hovering times.
You would easily be able to mount a full size camera on this.
Low cost but pretty decent quality overall.
Component list.
Frame, 450mm size from hobbyking, Its a DJI clone frame but this is the 3rd version.. seems quite robust.. great for a beginner or novice.
Link : http://hobbyking.com/hobbyking/store/__49725__Q450_V3_Glass_Fiber_Quadcopter_Frame_450mm_Integrated_PCB_Version.html
Motors , http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=18225 $60 for x4
Okay these motors are the minimum you would want.. You can go smaller like 28xx size but They do tend to get hot and if your system is not balanced one or 2 motors might work harder and get warmer when you fly acro.. with the bigger ones you have more head room.
So I found the 3530 to be a great motor for this frame.
(you do need to drill two extra hole on each motor mount to mount the motor directly to the frame.. you do not need to use the aluminium mount that comes with the motor.
Esc- 30 amp, Cheapest is the hobbyking series.. They will work.. I would strongly recommend getting ESC's with a Simonk Flash.. they cost around $13 from hobbyking..
- What is the simonk firmware? Its firmware to basically increase the response time of the esc from the flight controller. ( more stable flight)
Props, 10x4.5 props. example http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=25821 http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=25824
These props work well. they are cheap.. they break if you crash.. start with these and then go to carbon ..
-$20
Flight controller. $70
I have gone with the Multiwii pro, its cheap, comes with a gps.
http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=39333
Bluetooth module - for close range pc/phone connectivity. $9
http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=55126
All up total cost about $230-$240- ( if you did not want gps and just an acro quad, -$50)
You would also need to get a transmitter, you can go with a cheap hk 6 channel one for $30 or get a turnigy 9x for about $70..
you will get around 500 meters with the hk tx rx.. turnigy maybe 1km . but the turnigy can be upgrade for long range gear.
And finally the battery, you could fly with a 3ah battery for acro flight... lower weight.. you could use something the size of 8ah
Both need to be 3s, 4s will be to much for this propeller size..
1100kv + 3s + 10-4.5 props is a good combination. With 8ah you would get upto 15 mins hovering time which is not to bad for the power it has.
Keep in mind this quadcopter will be very powerful for acro flight as well...




")