So I finally have results after measuring with a multimeter.
When I connect only the throttle; my voltmeter reads ~0.85V between the Signal and Ground. It reads ~4.7V between ground and +ve. When I move the throttle; the signal and ground starts going up from 0.8V to ~4.5-4.7V; which I believe is how it should behave.
Sounds normal enough (many throttles only output up to around 4v or less, but some go higher, which is fine).
When I measure the Voltage between the blue cable (ebrake) and the red or orange cable(on/off, they are shorted); it reads ~56-57V, which is the charge of my battery. When I connect those two; the motor speeds up to what looks like max speed. Moving throttle during this period however doesn't have make any difference.
Ebrake is normally a low-voltage signal, so you shouldn't need to measure from it to battery voltage. It will normally be grounded (0v) when active, and 5v when inactive.
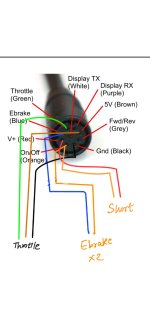
As I noted before, your diagram shows you are wiring it to run to battery voltage, which is normally very bad for the controller, and can damage the controller's ebrake signal input (or other damage to the MCU that may vary depending on the controller's specific design, causing permanent incorrect behavior of the system). It might not totally kill the controler, but it is unlikely to operate correctly wired this way.
Normally ebrake signals are run to a brake lever that has it's other wire going to ground, not to a voltage.
Depending on the version, the Baserunner/phaserunner also has the ebrake signal running to the throttle, so the throttle signal input to the MCU can also be damaged by the battery voltage, but even if it isn't. The throttle itself could also be damaged by this, depending on the sensor design used in it.
I don't know which BR you have, so you'll have to determine that and then use the appropriate manual:
The BR v4 manual (first dedicated BR manual version, before that the PR manuals are used; see below this section)
This states:
The CA3-WP device is plugged into the matching connector. All throttles, ebrakes, and PAS or Torque sensors are
plugged in directly to the Cycle Analyst. The 6 pin PAS plug of the controller is not typically used. However, a short adapter is provided that should be plugged into the 9 pin Mains cable. This adapter serves two purposes • It links together the ebrake and throttle signals of the controller so that the throttle output of the Cycle Analyst can be used for both throttle and regenerative braking control.
whcih indicates the BRv4 doesn't directly connect the throttle and ebrake like the V2 PR, so if you aren't using that adapter on the mains cable then they are separate wiring...but the ebrake is still not a battery voltage signal, it is a 5v level signal. More info on it's usage is stated as
The Baserunner has an analog ebrake line on the 9 pin Mains plug that can be used to provide smooth variable regenerative braking force from zero up to the max regen phase amps. In order to use the regen features of the V3 Cycle Analyst, this ebrake signal must be shorted to the throttle signal so that a single voltage can control both regen and power. This is achieved via the short 9Pin to 2Pin adapter cable discussed in Section 3.1.
and
The Ebrake signal on the 9 pin Main cable is an analog input that provides proportional braking control if desired. This is pulled to 5V internally, while the throttle signal is pulled low. If the throttle and ebrake signal are shorted together, then the signal level will sit at 1.0V, allowing a single wire bidirectional torque control with 0-0.9V mapped to regenerative braking, and 1.1-4.0V mapped to forwards torque. If these signals are not shorted together then a simple ebrake switch to ground will activate maximum regen. Alternatively a secondary throttle can be wired to this input to achieve proportional braking without a Cycle Analyst, in which case the regenerative brake mapping should be reconfigured to have similar start and end voltages as the throttle signal.
From the PR v2 manual:
2.3 Throttle Cable The throttle cable is terminated in a 3-pin JST plug and is used for simple systems with just a throttle control of the ebike, with or without a V2 Cycle Analyst (CA) display. The ebrake line is also tied into this throttle signal, and with the default settings the throttle signal voltage can be brought below 0.8V to activate proportional regenerative braking, allowing for the potential use of bidirectional throttles for control of both forwards torque and braking torque.
The v6 manual has different wiring sections depending on whether you're using it headless or with a CA,
One section describing it
The Phaserunner V6 by default has both the throttle signal source and the regen brake signal source coming from the same line, Analog Input 2, which floats at 1V when disconnected. This allows for a single wire to control both power and braking. The signal can be shorted to ground via an ebrake lever to achieve maximum regen braking. If completely independent throttle and regen brake signals are desired, then the throttle signal source can be changed to Analog Input 1. Separate wires can be used to control braking versus throttling..
The orange and red wires should get connected together when you wish to turn the controller on, but you should not connect any of the control signals to either one of them.
The orange wire takes battery voltage to supply to the controller LVPS that creates lower voltages to run the controller MCU and devices like throttle, etc.
And if you haven't already run the setup software and configured the BR for exactly how your system is setup and which motor parameters / limits / etc the system uses, you will need to do that for it to operate correctly (or at all), as it is not a plug-and-play controller and requires this setup to be completed.

")