First a short answer to Paultrafalgar,
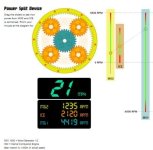
We plan to use HF pulse injection to step-up the induced voltage during low RPM regen. This is a form for step up conversion utilizing the induction in the stator that is used on the Prius to improve regen efficiency. This is probably covered by patents but hopefully they are limited to certain countries (likely) and possible vehicle types (not very likely). The power split device is as you say old school solution and should be straight forward. Actually, I found reference to the differential being invented in China more than four thousand six hundred years ago
")
- see http://books.google.no/books?id=0xNUx6kO0AYC&pg=PA301&lpg=PA301&dq=epicyclic+%22gobi+desert%22&source=bl&ots=FCm1xXtahD&sig=skRP9yDeCzr7YBbMyw4WbnAA-2s&hl=no&sa=X&oi=book_result&resnum=3&ct=result
Regarding Lawsonuw comment to the necessity of two motors and epicyclic gearing:
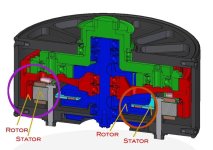
The use of two motors and an epicyclic gearing solves many challenges when trying to make a light and efficient propulsion system but adds complexity. The Nohassel design is an optimized compromise and is only useful when making a multi-targeted design. On almost every aspect it will be beaten by simpler designs when only looking at a single parameter, i.e. it's not: the lightest, strongest, most efficient, most cost efficient or smallest motor solution.
But it is probably the best compromise available by having:
Fully automatic transmission
Good torque - more than 100Nm on 26" wheel at hill clim speeds
High speed - 8000 RPM (80 km/h is possible without over-revving)
Sensorless reducing wiring and increasing reliability
No resistance while coasting up to 50 km/h
Efficient regen, even at low speed
Good weather protection
Low weight - less than 5kg/11lbs including batteries
DIY design reducing cost
Easy to install
The functionality of the two motors is controlled electronically. The basic function is quite logical:
A) set the most powerful motor (LRK) to a speed that is within range of epicyclic gearing for the wheel RPM
and optimized for LRK efficiency
B) set the speed of the smaller motor (HS) to a speed that matches LRK and wheel RPM (taken from a premade table in the master controllers program memory)
C) check if wheel speed is correct (based on sensor input from pedelec, brakes, throttle, current sensors, temperature sensors)
D) adjust target speed if needed and goto A)
There are some special cases:
1) Initiating sensorless LRK motor: The LRK is started running open-loop at a minimum speed. The HS will freewheel and the cycle will be stationary due to the HS motor not having much inertia. The HS will rotate backwards but will not brake since there is no current load.
2) Starting: The HS will be given a load by charging the battery as a generator. Increasing load will reduce the speed on the HS motor but the LRK speed is maintained by closed loop control so the output from the epicyclic will increase RPM and thus the speed of the cycle.
3) Coasting low-medium speed: The LRK will be more or less stationary and the HS will be free-wheeling up to 12000 RPM, having a coreless rotor it will not have iron loss and eddy losses should be very low due to stator being wound by very thin metal foil.
4) Coasting high-speed: The LRK is driven by voltage generated from HS to avoid over-revving the HS. Only enough energy to keep the LRK running is needed, thus low loss coasting should be possible at high speed.
5) Charging: The HS motor runs the cooling fan located on the motor axle. When charger or batteries get warm, the motor will need to start to prevent overheating. The LRK will run in oposite direction of the HS driven fan to keep the bicycle stationary. This has to be tightly controlled closed loop to prevent cycle from creeping slowly away.
Please find more info in the FAQ at the Nohassel development group: http://groups.google.com/group/nohassel
If anyone would like to join this open-source (and open-hardware) development, we could do with some more people. We need good engineering resources, especially for optimizing electromagnetic design of the motors, and helping out on the electronics design as we are designing our own
dsPIC33f based motor controller.
Cheers,
Per