izeman
1 GW
i just read through the hall sensor positioning manual crossbreak posted. really nice stuff.
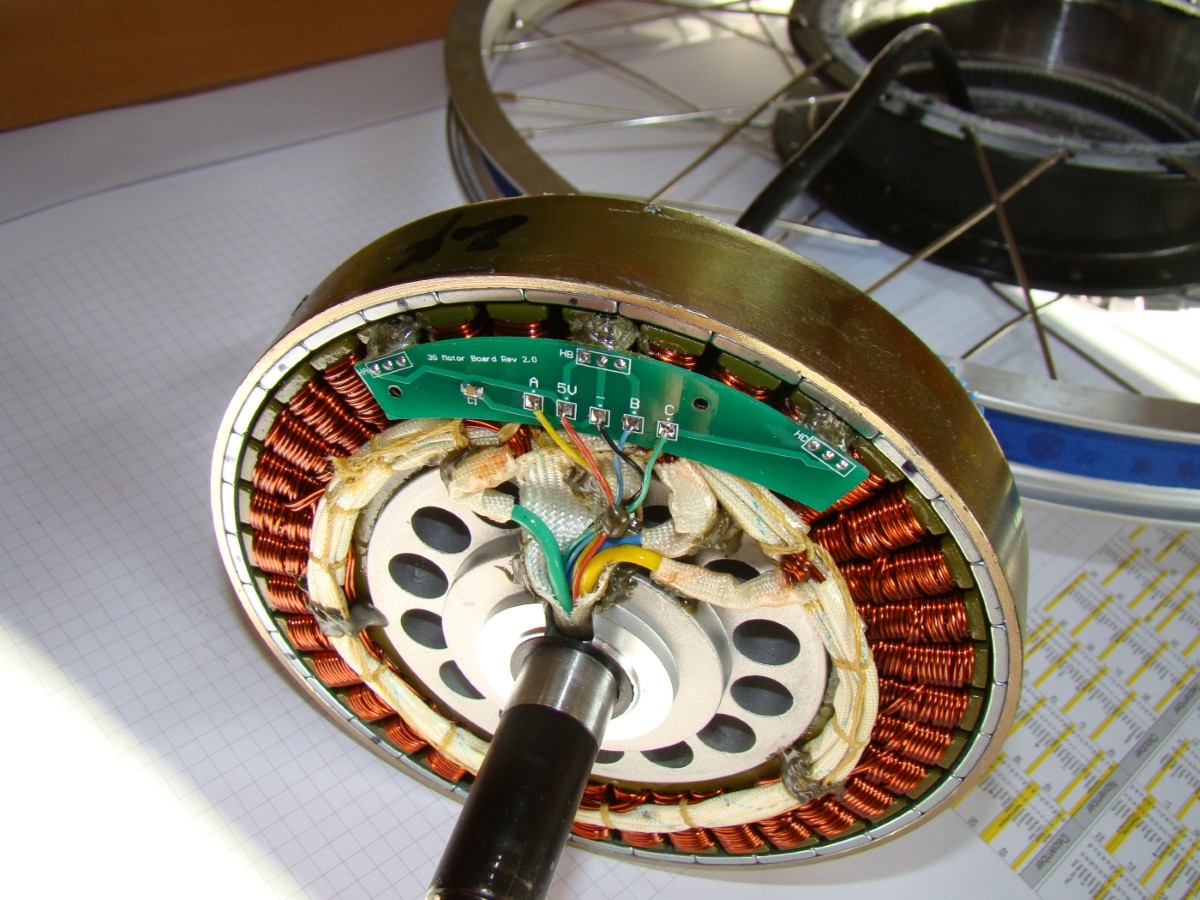
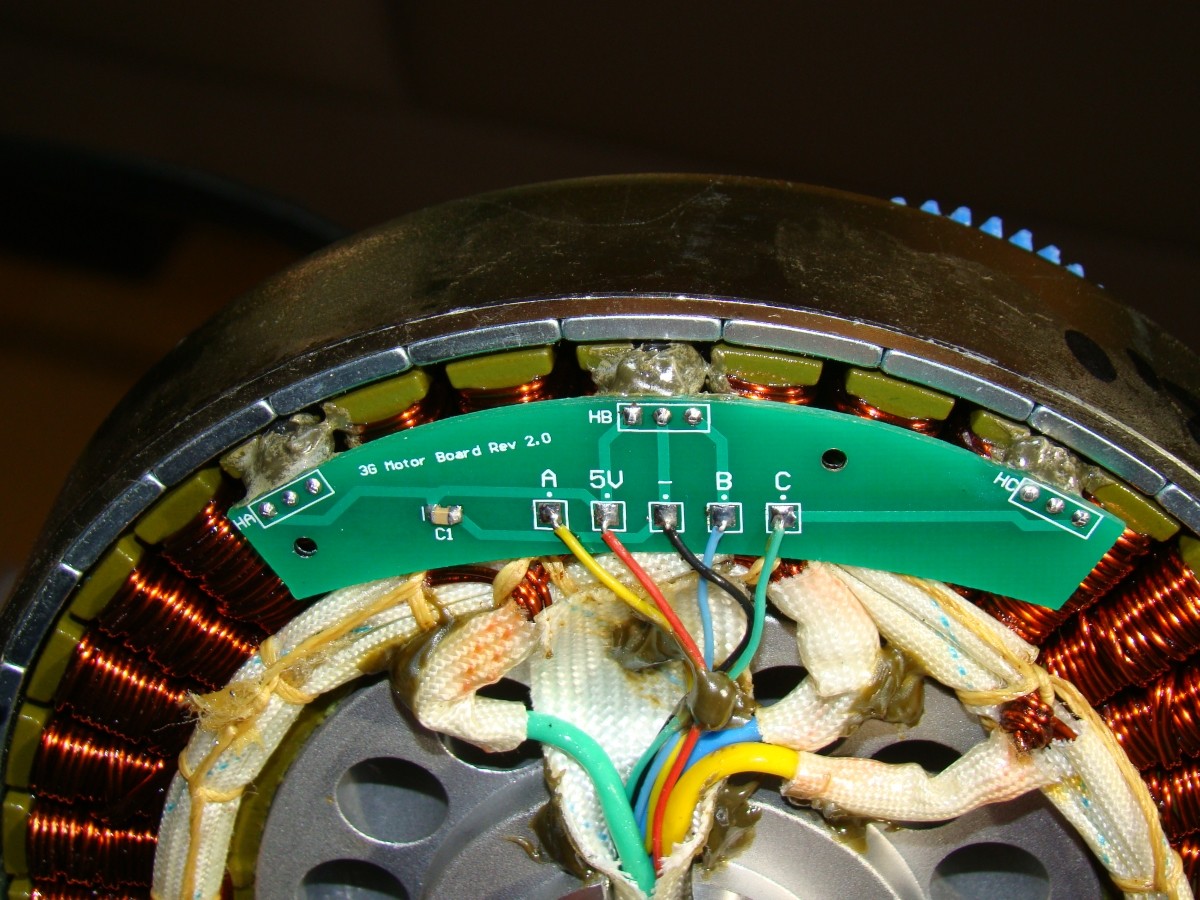
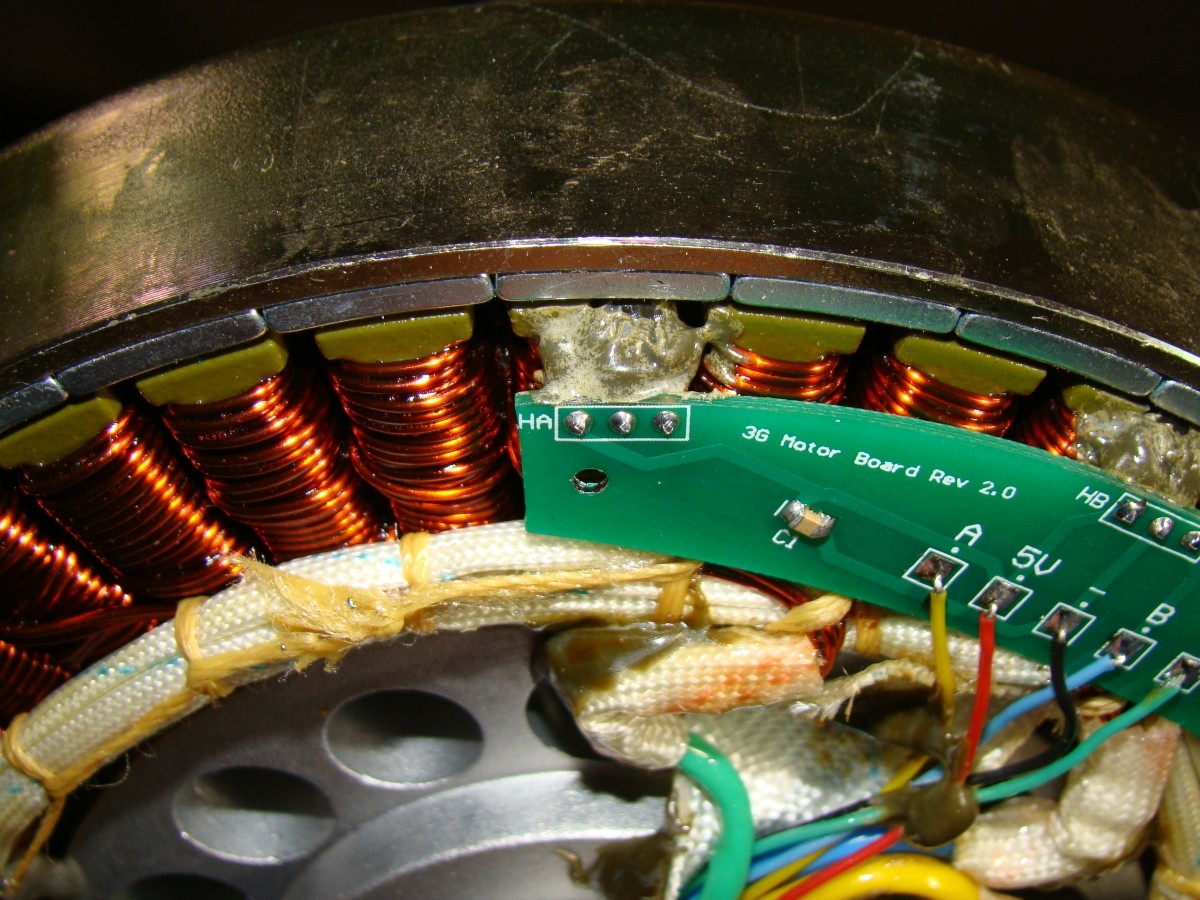
after doing all the math it just showed that the halls need to be positioned 3 slots apart, what they already are. it may be that the distance between them is not 100% exact, but i can't really imagine that.
so i can just do some timing advance to compensate for hall sensor lag and hysteresis. if the kelly controller would be a real FOC controller it would not relate on halls and measure back EMF, which is doesn't seem to do.
i will make a custom hall board that can be moved around and fixed to the motor and do some more testing.
after doing all the math it just showed that the halls need to be positioned 3 slots apart, what they already are. it may be that the distance between them is not 100% exact, but i can't really imagine that.
so i can just do some timing advance to compensate for hall sensor lag and hysteresis. if the kelly controller would be a real FOC controller it would not relate on halls and measure back EMF, which is doesn't seem to do.
i will make a custom hall board that can be moved around and fixed to the motor and do some more testing.

") we'll see how it performs.
we'll see how it performs.