Alan B
100 GW
One element of this project is a Throttle Manager that will control the two motor controllers and share the load. I've been working on this part lately, so here's an update.
The problem is we can't feed one throttle to two controllers and have good sharing of power and torque. Even with matched hubmotors there are problems, and we don't have matched motors here. The rear is a Nine Continents DD and the front is a BMC gearmotor. Their effective Kv's are similar, but they are not matched. Even with the same motors the controllers have variations and their grounds are not at the same exact potential due to the large currents flowing through the controllers. This makes their readings of the throttle differ, and change with time and loading. Others have reported hitting the throttle hard on a dual can cause galloping, or oscillation between the motors, or cause one motor to do everything and the other not help, while increasing power gradually avoided this. This can be understood by looking at the current/throttle apparent voltage as the "grounds" of the controllers shift with respect to one another while looking at the one throttle, causing their throttle inputs to shift.
We already know from experience with other controllers (such as the Sabvoton on the Borg linked in my signature) that torque throttle response is more desirable than the usual PWM throttle that the Xie Chang type controllers (and most other ebike controllers) give us. This becomes more important as the power level is increased. With two motors this ebike will have more power and be even more sensitive to throttle. So we want torque throttle response.
There are a few ways to get that. One is to replace the controllers with models that have torque control built in. There aren't too many controllers available at this end of the power scale that have that (especially low cost controllers). One could buy an Adaptto, they have torque throttle and AWD controls. But that is a significant investment and support and availability in the USA is difficult thus far. The Ebikes.ca BAC units are a possibility when they are more available (or out of beta), though I'm not sure how well they handle the gearmotors.
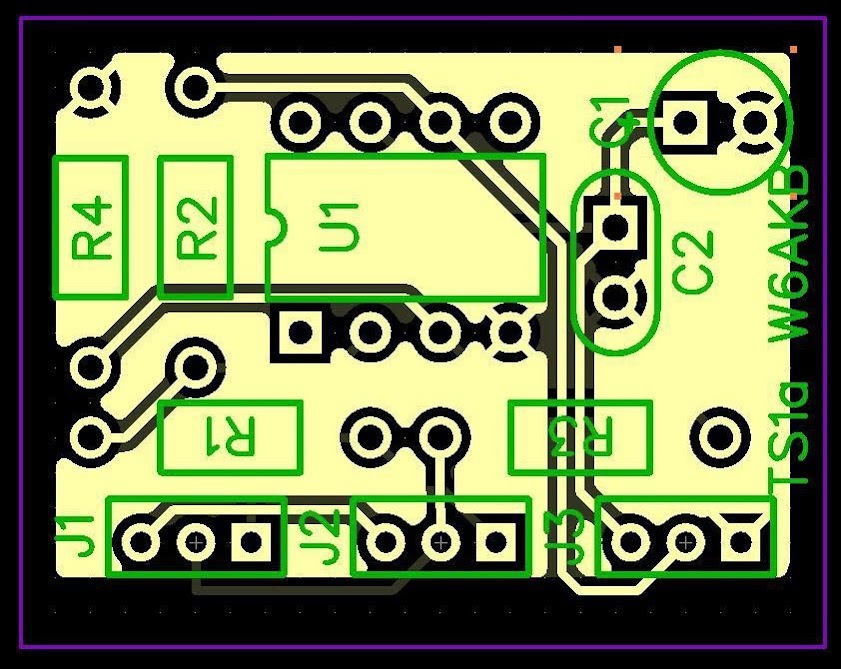
So I've been looking at what it would take to build a small circuit board that would perform both functions (torque control and throttle sharing) with a small Arduino type processor. Here is a similar one I built for the ebrake circuit on the Borg:
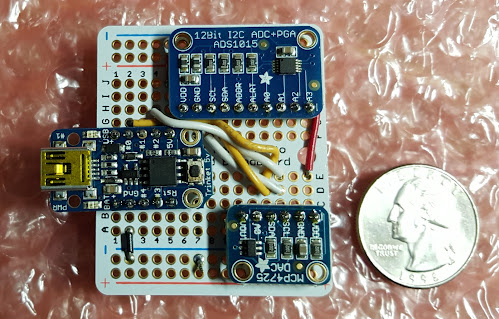
Above is an Adafruit Trinket with I2C ADC and DAC for processing the ebrake signal on the Borg, it is built and programmed but I didn't deploy it on the Borg because I found a way to adjust the controller parameters and avoid the need for this device, but it could be deployed for any project that needed a 12 bit multichannel ADC and one 12 bit DAC output. It could be used here, though it is a bit smaller than I'd like for what the throttle manager will need.
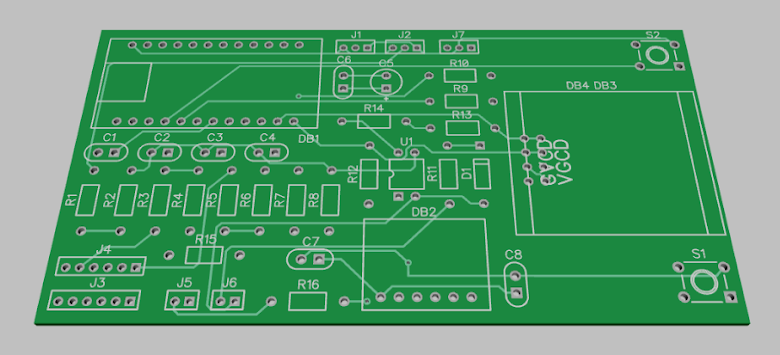
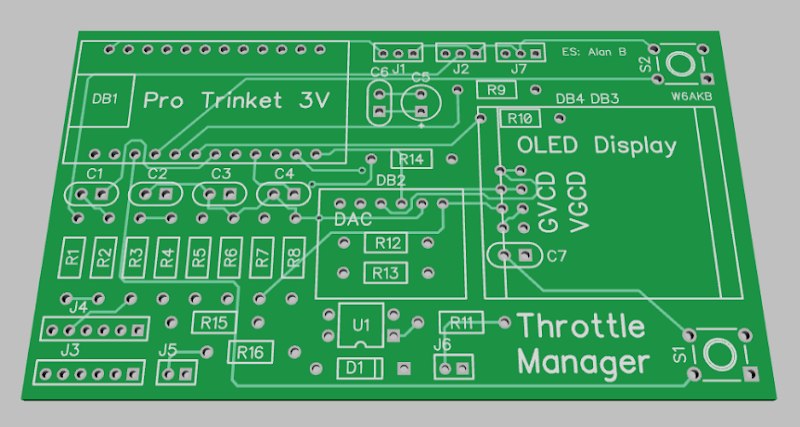
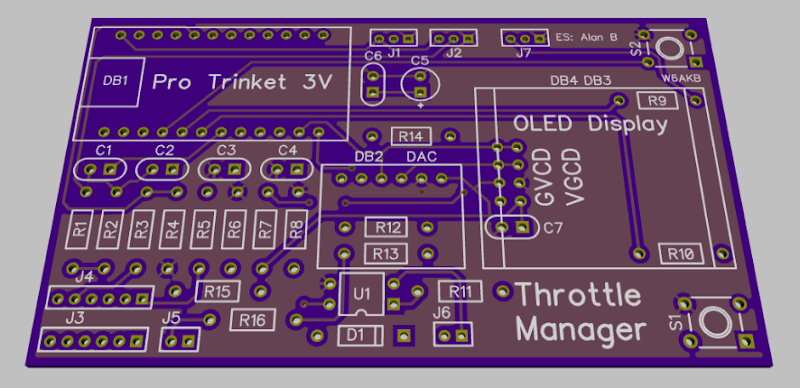
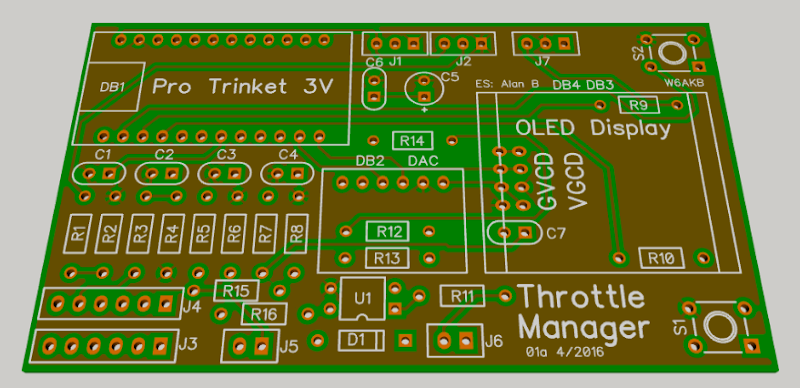
So I'm looking at using a slightly larger chip for the manager as I need more I/O and want a display for debugging and configuration:
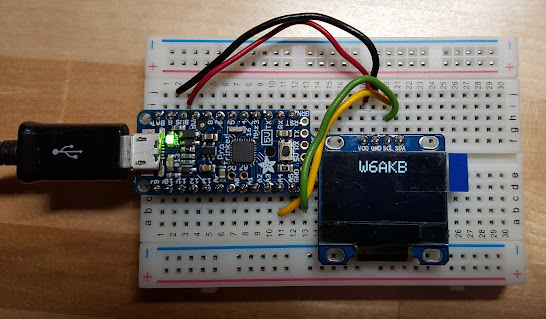
So this will be expanded with an ADC and a DAC (like the board above) and programmed for Throttle Management. I've talked about the algorithms to do this elsewhere on ES, but a real test is required to determine if the theory works well enough, or if the simplifications and assumptions made are accurate enough to produce a good torque throttle. If that works a simple extension to a dual version can handle the AWD in a nice fashion.
The additional problem is the gearmotor. To avoid slamming the gearmotor clutch will take some extra finesse, but that should be possible to add after the basic design is working.
The problem is we can't feed one throttle to two controllers and have good sharing of power and torque. Even with matched hubmotors there are problems, and we don't have matched motors here. The rear is a Nine Continents DD and the front is a BMC gearmotor. Their effective Kv's are similar, but they are not matched. Even with the same motors the controllers have variations and their grounds are not at the same exact potential due to the large currents flowing through the controllers. This makes their readings of the throttle differ, and change with time and loading. Others have reported hitting the throttle hard on a dual can cause galloping, or oscillation between the motors, or cause one motor to do everything and the other not help, while increasing power gradually avoided this. This can be understood by looking at the current/throttle apparent voltage as the "grounds" of the controllers shift with respect to one another while looking at the one throttle, causing their throttle inputs to shift.
We already know from experience with other controllers (such as the Sabvoton on the Borg linked in my signature) that torque throttle response is more desirable than the usual PWM throttle that the Xie Chang type controllers (and most other ebike controllers) give us. This becomes more important as the power level is increased. With two motors this ebike will have more power and be even more sensitive to throttle. So we want torque throttle response.
There are a few ways to get that. One is to replace the controllers with models that have torque control built in. There aren't too many controllers available at this end of the power scale that have that (especially low cost controllers). One could buy an Adaptto, they have torque throttle and AWD controls. But that is a significant investment and support and availability in the USA is difficult thus far. The Ebikes.ca BAC units are a possibility when they are more available (or out of beta), though I'm not sure how well they handle the gearmotors.
So I've been looking at what it would take to build a small circuit board that would perform both functions (torque control and throttle sharing) with a small Arduino type processor. Here is a similar one I built for the ebrake circuit on the Borg:
Above is an Adafruit Trinket with I2C ADC and DAC for processing the ebrake signal on the Borg, it is built and programmed but I didn't deploy it on the Borg because I found a way to adjust the controller parameters and avoid the need for this device, but it could be deployed for any project that needed a 12 bit multichannel ADC and one 12 bit DAC output. It could be used here, though it is a bit smaller than I'd like for what the throttle manager will need.
So I'm looking at using a slightly larger chip for the manager as I need more I/O and want a display for debugging and configuration:
So this will be expanded with an ADC and a DAC (like the board above) and programmed for Throttle Management. I've talked about the algorithms to do this elsewhere on ES, but a real test is required to determine if the theory works well enough, or if the simplifications and assumptions made are accurate enough to produce a good torque throttle. If that works a simple extension to a dual version can handle the AWD in a nice fashion.
The additional problem is the gearmotor. To avoid slamming the gearmotor clutch will take some extra finesse, but that should be possible to add after the basic design is working.
")