Ignoring small differences resulting from differences in copper fill, motors of different Kv are capable of exactly the same power, torque, rpm, efficiency, heat etc. The magnetic circuit and physical structure determine everything, and a factor in that is the total amount of copper that fits, not how it is wound. How it is wound (iow the Kv) only determines the combination of voltage and current to get the identical result for power, torque, rpm, efficiency, etc.
Kv and Kt (the torque constant) have a fixed inverse relationship. Kv in rpm/v = 9.549 x Kt in Nm/A, so if you know a motor's rpm/volt you also know it's torque per amp. Don't let that mislead you into thinking low Kv means more torque though, because it leaves out current handling and heat (efficiency) per unit of torque. The higher Kv motor has shorter thicker copper, so you reduce voltage and increase current for an identical result.
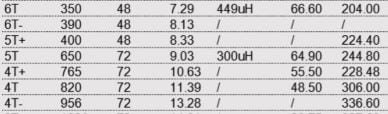
The best example is Astro's test results for it's 3210 motor, all identical for different windings:
Where the meaningful differences arise is when you're chasing performance and the motor isn't at its rpm limit. We end up limited by voltage, so the high Kv verson of the same motor wins every time, and efficiency trumps everything. The proof is in the pudding. Liveforphysics Deathbike with its high efficiency custom motor beats even Teslas at the dragstrip. Sn0wchyld stays up dreaming of a higher Kv version of the 93% peak efficiency motor he has. Toolman2 races and beats smoke spewing motos with his high efficiency fast spinning Joby motor. When Recumpence wants more get up and go on his high tech works of art he opts for the higher Kv version of his Astro motors. Despite weighing 300lbs just over a year ago my extreme efficiency hubmotor allows me to ride the fastest hubmotored ebike in the world, and because I gear it down with the smallest practical wheel I can climb any incline I dare. I can't wait for rainy season to end to bring out the new baby I built as my reward for dropping 80lbs and counting. The 20% reduction in total load is going toward a 10% bigger wheel for an even more insane top speed, and the other 10% toward even scarier acceleration. Plus the lower overall system stress will allow me to turn my controllers even higher but still retain absolute reliability. This is all possible not because I run the best hubmotor, but because I run the highest Kv hubmotor at over 18rpm/volt at the highest practical voltage, 30s.