Mattias
1 mW
- Joined
- Jun 18, 2016
- Messages
- 17
Hi, I'm new on this forum and to the technology you discuss here.
I have technical/mechanical knowledge in general and understand most of what I read here")
This will be my build/question/inspiration/suggestions thread
I'm building this for my girlfriend that have a spinal injury.
In the picture is a finished product of a "downhill quad bike" with 2wd hub-motors rated almost 1000w each from the manufacturer.
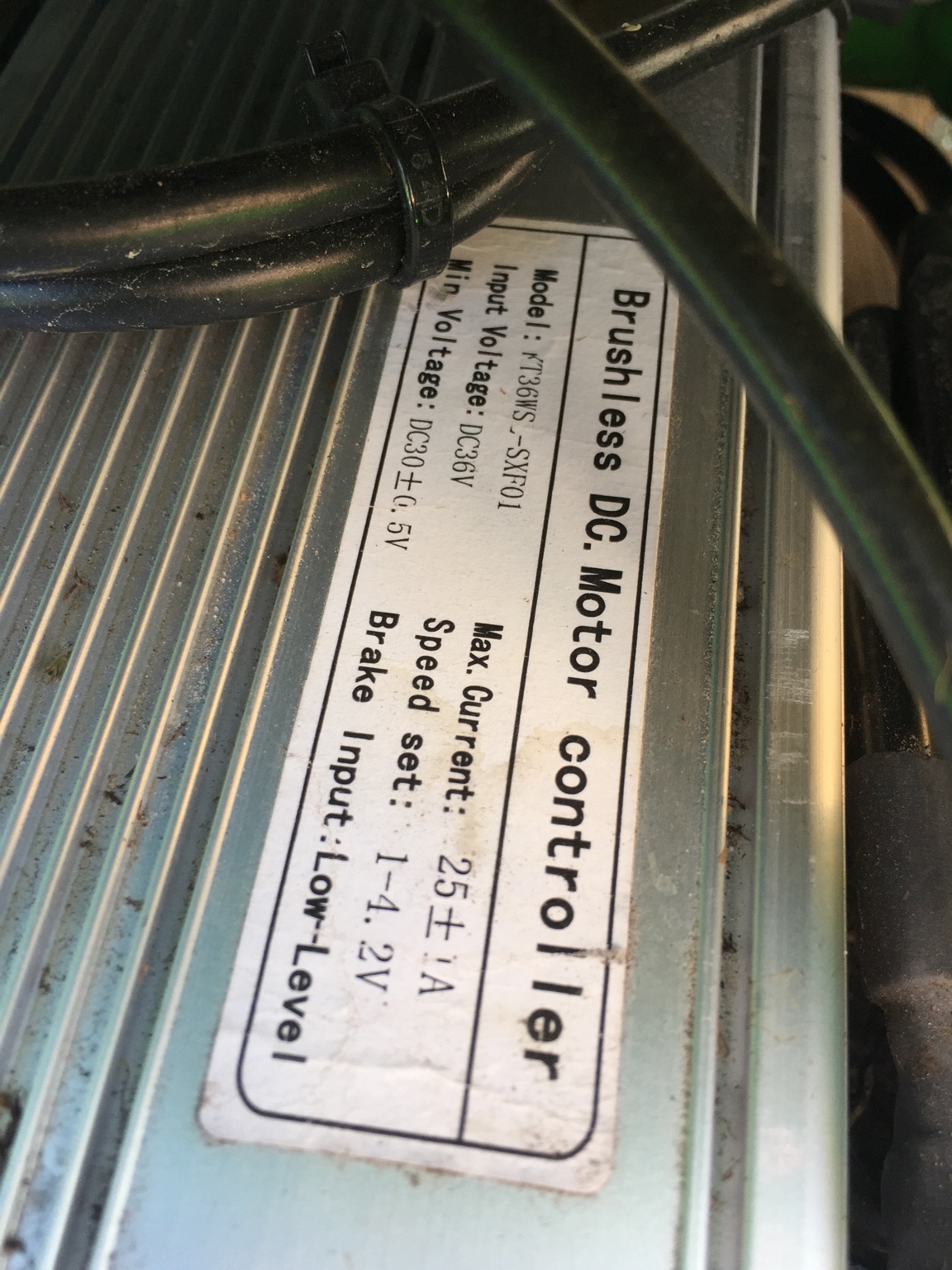
There is no name on the motors so have no more info, but they are planetary gears type and 36v. There's two controllers rated at 25A each.
Total weight with driver is approximately 120kg (265 lb)
More info on http://www.quadrix-team.com
We had the chance to try this quad on the trails this week and noticed right away that it's a downhill and not a uphill purpose vehicle.
It will stop very easy when driving slowly up a hill.
It uses some type of "traction control" but it feels like it limits both motors and stalls if you are driving uphill.
What I want:
I want to use this chassis but make it crawl uphill with 4wd and use hub motors (if possible?)
The rear hubs looks like conventional bicycle hub motors, front wheels are single side mounted. It also need to be reliable.
Top speed is not important because she just wants to hike with her friends. Walking phase with a little extra would be enough.
Questions:
Shouldn't it perform better or be more powerful with those 1000w geared motors?
What do you think is the best motor setup?
"Direct drive" "geared hub" "chain drive" "4-link with axles" ...
Is it possible to convert any hub motor to "single side shaft"?
Like this one http://www.ebikes.ca/shop/ebike-parts/motors/m3540ss.html
Is it enough with geared motors or will it never be able to crawl like I want?
I know there is 2wd controller setups but is there a 4wd setup? And what are your thoughts about this?
Is there a traction control that works?
That doesn't limit all motors and only the ones that spins...
I know the difference in "turns" of the motor but what is the most turns "hi torque" you get without building it yourself?
Would the MAC 12T motor be a option?
http://em3ev.com/store/index.php?route=product/product&path=50_40&product_id=207
I have probably hundreds more questions but we start here hope you guys can help us in the right direction.




Sent from my iPhone using Tapatalk
I have technical/mechanical knowledge in general and understand most of what I read here
This will be my build/question/inspiration/suggestions thread
I'm building this for my girlfriend that have a spinal injury.
In the picture is a finished product of a "downhill quad bike" with 2wd hub-motors rated almost 1000w each from the manufacturer.
There is no name on the motors so have no more info, but they are planetary gears type and 36v. There's two controllers rated at 25A each.
Total weight with driver is approximately 120kg (265 lb)
More info on http://www.quadrix-team.com
We had the chance to try this quad on the trails this week and noticed right away that it's a downhill and not a uphill purpose vehicle.
It will stop very easy when driving slowly up a hill.
It uses some type of "traction control" but it feels like it limits both motors and stalls if you are driving uphill.
What I want:
I want to use this chassis but make it crawl uphill with 4wd and use hub motors (if possible?)
The rear hubs looks like conventional bicycle hub motors, front wheels are single side mounted. It also need to be reliable.
Top speed is not important because she just wants to hike with her friends. Walking phase with a little extra would be enough.
Questions:
Shouldn't it perform better or be more powerful with those 1000w geared motors?
What do you think is the best motor setup?
"Direct drive" "geared hub" "chain drive" "4-link with axles" ...
Is it possible to convert any hub motor to "single side shaft"?
Like this one http://www.ebikes.ca/shop/ebike-parts/motors/m3540ss.html
Is it enough with geared motors or will it never be able to crawl like I want?
I know there is 2wd controller setups but is there a 4wd setup? And what are your thoughts about this?
Is there a traction control that works?
That doesn't limit all motors and only the ones that spins...
I know the difference in "turns" of the motor but what is the most turns "hi torque" you get without building it yourself?
Would the MAC 12T motor be a option?
http://em3ev.com/store/index.php?route=product/product&path=50_40&product_id=207
I have probably hundreds more questions but we start here
hope you guys can help us in the right direction.
Sent from my iPhone using Tapatalk