
I think he means that you have to request the data from the controller. That is, you have to send a command over serial to the controller and then it responds back with the data. I'm not sure if Kelly has published that protocol. However, their CAN protocol is pretty well documented and should be easy to work with if you have a device that can read CAN messages.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
New Kelly pseudo FOC controller series
- Thread starter crossbreak
- Start date
SplinterOz
1 kW
catacon said:I think he means that you have to request the data from the controller. That is, you have to send a command over serial to the controller and then it responds back with the data. I'm not sure if Kelly has published that protocol. However, their CAN protocol is pretty well documented and should be easy to work with if you have a device that can read CAN messages.
Correct I was lax with my language. You will need a serial sniffer to figure it out. I think there is a thread that someone else created on this.
Emoto said:Ok fellas thanks, Ill know in a few days If i get a kls..... And ill run it with the android app first and evaluate its usefulness , as said before logging would be a good idea .
1,Bluetooth function is available on KLS/KAC/KPM controller.Customers just need to buy bluetooth converter from Kelly website.
KAC is used for AC induction motor controller with encoder.
KPM is designed for brushed PM motor.
2,Three speed function is available on KLS controller also.Right now it is not released in the standard version.But customers need this function,we can add it.Just leave the comment in the order list or send email to me before ordering.
Three speed function will use pin9,pin12 and pin11.So original function on pin9 will be removed.Pin9 will be used as low speed function.
Pin12 is forward direction function.The three speed function can be enabled in the user program.When you enable three speed function,pin12 is used as high speed function.
You can configure different speed rating for low,medium and high speed mode.
We will release the new version for KLS controller which will include the three speed function and eliminate RLY driver function by default.
3,We sold KLS controllers for over 1.5 years.So I had experienced with more examples about the auto identification with different motors.
The motor has good or had quality from different suppliers.Some motors are very good.It can do the ID operation quickly.
Some other motors may not be balanced well.There is a big deflection or tolerance between hall and phase timing.So it can not finish the ID operation.
I did get this experience with some customers' motor.
Some customers adjusted the hall sensors position so that the waveform can match with each other well.The motor can be drived again.
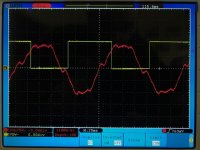
If you have the OSC device,please try to capture the waveform of hall/phase timing.
We will know if there is a big tolerance between hall waveform and phase timing waveform.
4,CAN bus is broadcast type on KLS-D/H/8080I controller.
We included the protocol of broadcast CAN bus in the user manuals.
But CAN bus need an external PCB Board inside the controller.KLS-S has small room inside.We can not add CAN bus function on KLS-S model.
So there is no choice to add CAN bus on KLS-S when you order this controller.
The broadcast CAN bus is only available for KLS-D/H/8080I controller.The CAN bus is optional function for KLS-D/H.If customers don't pay it,we will not add this CAN bus board.
The KLS-8080I/8080IPS included the CAN bus by default.Because KLS-8080I/IPS is very huge.And CAN bus board came with the whole PCB board.
The broadCast CAN bus means the controller will send all the messages per 50ms.You don't have to send any commands and ask for response.
This CAN protocol is a little different from the CAN function on other KBL,KHB controllers.
5,KLS-D/8080I/IPS included the fuse and shunt by default on the top of case.
KLS-S doesn't include fuse or shunt by default.
The KLS-H can include fuse or shunt.By default,it includes the fuse.
So it is better to use KLS/D/H/8080I/IPS controller for CA.
And KLS-8080I/IPS controller is isolated type.The CA is not.The signal from CA may not used to try to control the motor speed or torque.
By the way,a company in Austria developed a LCD display for our KBL and KLS controller.It is based on CAN communication.
It is very beautiful.But we don't sell this device.Customers can contact them directly.
Link for the test video: MechatroMotive_RCD_EVO2_Kelly_KLS_Demo.mp4
Two links for the display (its for gas version, but the design same as electric version):
http://mechatromotive.com/en/termekek/rcd-display/
http://mechatromotive.com/en/termekek/rcd-display-evo2/
George Dreisziger
Green-Scooter.hu
It is very beautiful.But we don't sell this device.Customers can contact them directly.
Link for the test video: MechatroMotive_RCD_EVO2_Kelly_KLS_Demo.mp4
Two links for the display (its for gas version, but the design same as electric version):
http://mechatromotive.com/en/termekek/rcd-display/
http://mechatromotive.com/en/termekek/rcd-display-evo2/
George Dreisziger
Green-Scooter.hu
Fanny ill be getting a kls-s so i will have to rely on the kelly android app , i dont want to sound ungrateful but for [ me] and all the kls-s owners out there i would like to push for development on the kelly android app this could have great potential as a displayif it had logging of dc amps batt voltage motor temp ect after all [who doesnt have a android device] . also make all kls-s controllers able to reflash firmware's to we can add 3 speed functions ect. this of course will improve sales. everybody wins
Also The kls-s im looking at has a firmware version of 0110 and am told by the retailer its not able to re-flash is this true .
Also The kls-s im looking at has a firmware version of 0110 and am told by the retailer its not able to re-flash is this true .
fany said:3,We sold KLS controllers for over 1.5 years.So I had experienced with more examples about the auto identification with different motors.
The motor has good or had quality from different suppliers.Some motors are very good.It can do the ID operation quickly.
Some other motors may not be balanced well.There is a big deflection or tolerance between hall and phase timing.So it can not finish the ID operation.
I did get this experience with some customers' motor.
Some customers adjusted the hall sensors position so that the waveform can match with each other well.The motor can be drived again.
If you have the OSC device,please try to capture the waveform of hall/phase timing.
We will know if there is a big tolerance between hall waveform and phase timing waveform.
.
aha....
easy to say "bad motor"...why does these bad motors runs with probably all other controllers out there?
and if its the "bad motor"..why the Software has no option to setup manual?
this answer from a company like kelly is a joke for me...sorry.
from a guy like lyen i would expect those "answer"....
There is just a few days left on this deal so i thought id post it for any one who has been on the fence about getting a KLS7230S,24V-72V,[300A phase amp ] @ US100.+ shipping to aus was 37usd.
http://wholesaler.alibaba.com/product-detail/Kelly-QSKLS7230S-24V-72V-300A-60V_60588830695.html?spm=a2700.8304367.0.0.HxApjF
ive ordered one, at that price its worth a shot i reckon.
http://wholesaler.alibaba.com/product-detail/Kelly-QSKLS7230S-24V-72V-300A-60V_60588830695.html?spm=a2700.8304367.0.0.HxApjF
ive ordered one, at that price its worth a shot i reckon.
DaDo.Bzz
100 W
- Joined
- Feb 12, 2015
- Messages
- 211
izeman
1 GW
it's very easy to check if a controller has "torque" or "speed" mode throttle.
you just need to lift the wheel from the ground, and slightly open the throttle. if you wheel revs up to full speed with only a little throttle (and current around no-load current), then you know you've got a "torque throttle".
if you need to fully open the throttle to get full speed, then you got a "speed throttle".
so just try out, and you'll see if fany told you the truth.")
you just need to lift the wheel from the ground, and slightly open the throttle. if you wheel revs up to full speed with only a little throttle (and current around no-load current), then you know you've got a "torque throttle".
if you need to fully open the throttle to get full speed, then you got a "speed throttle".
so just try out, and you'll see if fany told you the truth.
DaDo.Bzz
100 W
- Joined
- Feb 12, 2015
- Messages
- 211
izeman said:it's very easy to check if a controller has "torque" or "speed" mode throttle.
you just need to lift the wheel from the ground, and slightly open the throttle. if you wheel revs up to full speed with only a little throttle (and current around no-load current), then you know you've got a "torque throttle".
if you need to fully open the throttle to get full speed, then you got a "speed throttle".
so just try out, and you'll see if fany told you the truth.
Yes, it is speed throttle. Hope it will have fast response to throttle.
DaDo.Bzz
100 W
- Joined
- Feb 12, 2015
- Messages
- 211
DaDo.Bzz said:Hello guys.
So measured timing of phase and hall and looks like all hall signals are delayed by 60 degree. Is that ok?
Anyway, Fany told me KLS sine wave controller has just torque mode! So now confused.
I measured in star with ground. And just found out it is shifted 30 degree. So motor is off by 30 degree now. But this is compensated in controller, no? By autocalibration.
larsb
1 MW
@Fany: I have a Kelly KLS and would really like to have the three speed function mentioned above. Can this be updated by SW download to the controller?
I think most customers would like this option!
I think most customers would like this option!
DaDo.Bzz said:Anyway, Fany told me KLS sine wave controller has just torque mode! So now confused.
you can choose between torque or speed based throttle in the user program, but it won't change a thing..
Kelly is kidding us.
I wonder how regen needs to be hooked up on those KLS-S controllers.
On the KBS-X, there must be a pushbutton pressed first, and than, the regen strength can be varied with an additional "throttle device".
Can anybody tell if it is the same on the KLS-S, and if it works well?
about acceleration from 0-10kmh on DD hub motors:
the KBS-X has quite poor torque, even with the amps maxed out (noisy and big vibrations).
do the KLS now have better torque from 0 rpm, or did anybody notice the above mentioned problem when using direct drive hub motors?
On the KBS-X, there must be a pushbutton pressed first, and than, the regen strength can be varied with an additional "throttle device".
Can anybody tell if it is the same on the KLS-S, and if it works well?
about acceleration from 0-10kmh on DD hub motors:
the KBS-X has quite poor torque, even with the amps maxed out (noisy and big vibrations).
do the KLS now have better torque from 0 rpm, or did anybody notice the above mentioned problem when using direct drive hub motors?
for the KLS question: no button needed.
just press your favorite "throttle".
BUT (dont know why, but its confirmed)
setting up ebrake affects also your throttle "behavior"....
ok for 2KW setups on your girlfriends bike (or any other commuter)
nothing for someone who was allready on the other side of "whats possible" with other brands....
just press your favorite "throttle".
BUT (dont know why, but its confirmed)
setting up ebrake affects also your throttle "behavior"....
ok for 2KW setups on your girlfriends bike (or any other commuter)
nothing for someone who was allready on the other side of "whats possible" with other brands....
Maybe hardware related with newest revision? First kls-s didn't have variable regen...madin88 said:DaDo.Bzz said:Anyway, Fany told me KLS sine wave controller has just torque mode! So now confused.
you can choose between torque or speed based throttle in the user program, but it won't change a thing..
Kelly is kidding us.
Hi guys. Do you have experience with *** *** hall throttle related error? I've tried everything, but i can't solve it. My throttle is OK(measured), another throttle didn't solve problem. Directly soldered contact didnt solve problem. If i disable tps low protection, error will disappear, but motor shutter once every wheel spin. One month after warranty period. :-(
izeman
1 GW
could you pleas be a bit more precise? what it happening when you're doing what?
i read your post twice but couldn't make any sense of it.
what is a "*** *** hall throttle related error" ??
what controller type do you have? any CA connected?
i read your post twice but couldn't make any sense of it.
what is a "*** *** hall throttle related error" ??
what controller type do you have? any CA connected?
I mean 3-3 error code blinks. Throttle is connected into controller. My controller is kls-s 200A. My settings was 2 months old and without problems until now. Without any notice motor starts shutter and controller blinks this error. To release this error i must change throttle type to 1 (i have hall throttle) but motor still little Shutter every spin of wheel. This is now solved by change of hall set. Very strange, but controller and motor works now. Sorry for my English, hope it's better than Google Translate. 
izeman
1 GW
No problem your English is fine. Just asked to be sure what your problem was.
You said you replaced the hall? The hall in the throttle or the halls in the motor?
Do you have a spare throttle to try?
You said you replaced the hall? The hall in the throttle or the halls in the motor?
Do you have a spare throttle to try?
Spare throttle didn't solve anything. I mean motor halls change. With one year experience with kelly It sometimes seems to be little buggy. I try o describe my another bugs. My settings is 4,3kw with full charged battery. 3,3kw with nearly empty battery. But yesterday Kelly was add more power uphill 4,9kw instead of starting lvc :-D. I've newer had that much power in my settings. And sometimes Kelly lost the power without any reason(cold started). I've solving that by reflashing battery and motor current settings ... Stranger things :lol:
DanGT86
100 kW
I was about to buy a KLS7212S,120Amp controller then I read most of this thread and I'm wondering about a couple of things that were mentioned. Hopefully one of you can answer a few questions.
This is the setup:
80100 RC motor with 120deg external hall sensors
20s~75v battery
80kv motor spins 6000RPM
motor has 7pole pairs so at 6000rpm the Erpm is 40k+
I'm happy with 3-4k watts but would be nice to peak at 5-6k for very short bursts.
The things I would like to be sure about:
1-Are these controllers confirmed to work well above 40k ERPM?
Somebody in this thread mentioned having issues at high Erpm. Is this settled? I am around 40k right now but I can switch between delta and wye so I might spin it faster later trying to keep this tiny motor alive.
2-CA3 throttle isolation.
It was mentioned that the throttle signal has to be directly to the controller because the CA3 is not isolated and will cause problems. Is this true? I can understand that concept generally but I'm having trouble visualizing where it is a problem. Any chance a simple diode in a throttle wire could correct that somehow? Is there an easy workaround to isolate them? I would hate to lose the throttle tuning capability of the CA3. On the other hand maybe its not needed since the current control strategy sounds much better than the speed based infineon controllers I'm used to.
3-Hall sensor learning/detection. Is this feature designed to optimize the wiring combination or will it actually optimize the timing as well?
Just wanting to understand this better. I am using an adjustable external hall sensor board on my outrunner and I can't be sure I have the halls in the perfect spot. Can the auto detect feature be disabled? I would like to be sure my halls are positioned in the best position before letting a controller try to "learn" them.
4-Real world power expectations? Will the KLS7212S controller provide 3000watts continuous? Trying to relate this to my HUB only experience thus far. I'm happy with the power of my current setup which sees occasional battery amp peaks around 80-90 amps however my phase current is set about 2x the battery current. Since the kelly is rated at 50amps cont and 120a burst at the motor, am I being unrealistic to think it would feel similar to my current setup?
Sorry for asking questions that are covered in the thread but its all buried in 19pages and over a couple of years. Thanks for any advice.
This is the setup:
80100 RC motor with 120deg external hall sensors
20s~75v battery
80kv motor spins 6000RPM
motor has 7pole pairs so at 6000rpm the Erpm is 40k+
I'm happy with 3-4k watts but would be nice to peak at 5-6k for very short bursts.
The things I would like to be sure about:
1-Are these controllers confirmed to work well above 40k ERPM?
Somebody in this thread mentioned having issues at high Erpm. Is this settled? I am around 40k right now but I can switch between delta and wye so I might spin it faster later trying to keep this tiny motor alive.
2-CA3 throttle isolation.
It was mentioned that the throttle signal has to be directly to the controller because the CA3 is not isolated and will cause problems. Is this true? I can understand that concept generally but I'm having trouble visualizing where it is a problem. Any chance a simple diode in a throttle wire could correct that somehow? Is there an easy workaround to isolate them? I would hate to lose the throttle tuning capability of the CA3. On the other hand maybe its not needed since the current control strategy sounds much better than the speed based infineon controllers I'm used to.
3-Hall sensor learning/detection. Is this feature designed to optimize the wiring combination or will it actually optimize the timing as well?
Just wanting to understand this better. I am using an adjustable external hall sensor board on my outrunner and I can't be sure I have the halls in the perfect spot. Can the auto detect feature be disabled? I would like to be sure my halls are positioned in the best position before letting a controller try to "learn" them.
4-Real world power expectations? Will the KLS7212S controller provide 3000watts continuous? Trying to relate this to my HUB only experience thus far. I'm happy with the power of my current setup which sees occasional battery amp peaks around 80-90 amps however my phase current is set about 2x the battery current. Since the kelly is rated at 50amps cont and 120a burst at the motor, am I being unrealistic to think it would feel similar to my current setup?
Sorry for asking questions that are covered in the thread but its all buried in 19pages and over a couple of years. Thanks for any advice.
Similar threads
- Replies
- 5
- Views
- 174
- Replies
- 3
- Views
- 800
- Replies
- 7
- Views
- 273