macribs
10 MW
- Joined
- Jul 22, 2014
- Messages
- 3,702
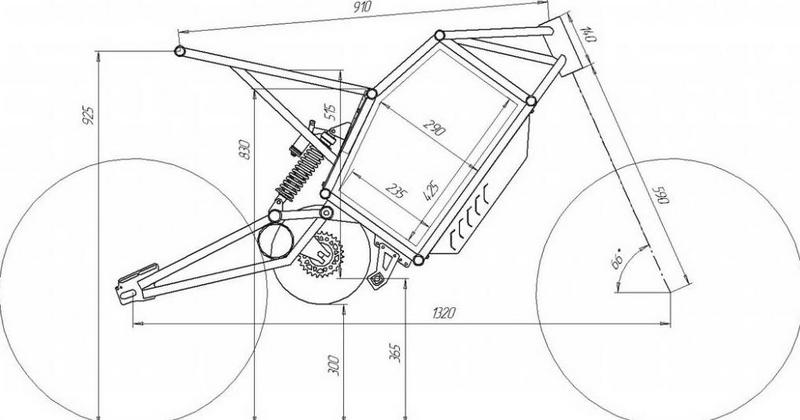
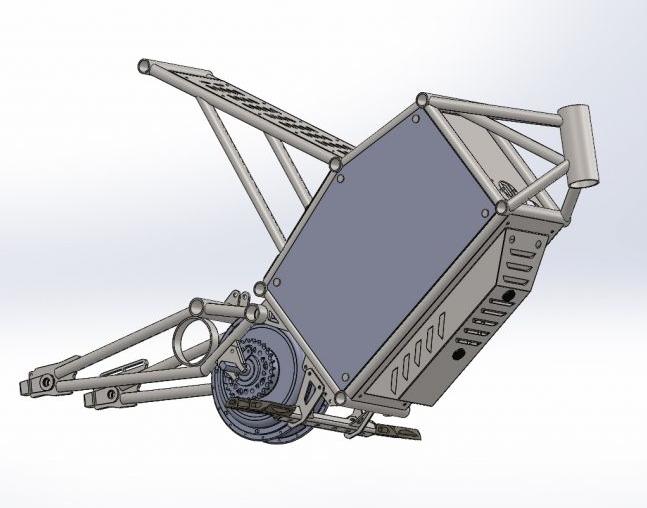
There is a new mid drive frame coming this year. Using QS 205 as mid drive. Motor is attached to the swing arm very close to pivot point. Axle is stationary and the carcass spins. Front sprocket attached to motor side covers. Moto 420 chain/sprockets. Max RPM @ 72v about 1300 RPM.
What can be expected by running a 205 as a mid drive? If volted up to 22s max RPM close to 1500 RPM. So almost three times the speed of the rear wheel at 50 mph. If geared for 50 or 60 mph top speed how will the take of torque and acceleration differ from a regular 205 hub motor in rear wheel? What about mid range, how will mid range acceleration be different?
Sprocket ration > 2:1 should be possible. How does that translate into torque on the ground? I mean how will the motors max torque play out via chain and sprocket? Will acceleration become faster yet with a lack of top speed? And how will FOC play out? I am thinking both in terms of the amount of extra heat field weakening put put, but also in terms of what can be expected in extra top speed. I remember Axel raised top speed with around 28% on his bomber with FOC.
I guess such a mid drive will climb much steeper then a 205 in the hub? And with less heat as well. Also the weight of the motor is removed from inside the hub, giving more centralized mass. I can't think of any cons of running a hubmotor as a mid drive. But given that it is not commonly done I might be overlooking something?
I know I've seen a build or two here on ES that had a dd hub used as a mid drive but I can't seem to find back to those. If your search query are better then mine pls share link to builds that are similar as I would like to tread up on this subject.

What can be expected by running a 205 as a mid drive? If volted up to 22s max RPM close to 1500 RPM. So almost three times the speed of the rear wheel at 50 mph. If geared for 50 or 60 mph top speed how will the take of torque and acceleration differ from a regular 205 hub motor in rear wheel? What about mid range, how will mid range acceleration be different?
Sprocket ration > 2:1 should be possible. How does that translate into torque on the ground? I mean how will the motors max torque play out via chain and sprocket? Will acceleration become faster yet with a lack of top speed? And how will FOC play out? I am thinking both in terms of the amount of extra heat field weakening put put, but also in terms of what can be expected in extra top speed. I remember Axel raised top speed with around 28% on his bomber with FOC.
I guess such a mid drive will climb much steeper then a 205 in the hub? And with less heat as well. Also the weight of the motor is removed from inside the hub, giving more centralized mass. I can't think of any cons of running a hubmotor as a mid drive. But given that it is not commonly done I might be overlooking something?
I know I've seen a build or two here on ES that had a dd hub used as a mid drive but I can't seem to find back to those. If your search query are better then mine pls share link to builds that are similar as I would like to tread up on this subject.
")