
Lebowski
10 MW
some more info:
Quite soon after building the v1.00 chip I figured out that matching the backemf of the motor is not what you want.
Think about it, you don't really care about what the output voltage of the controller looks like. What you want is ripple free power delivery by the motor, no high frequency torque ripple or the noise from this.

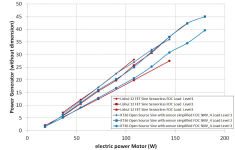
Above is what I mean, the three curves in the bottom are the power delivered by each individual motor phase, all 3 add up to the straight line at the top of the figure. Straight ripple free power delivery is what you want.

The picture above is what you get when you drive a trapezoidal motor with a sine wave controller. The trapezoidal motor is modelled with 5th order harmonic only (there's also 3rd which cancels out, 7th etc etc). You can see power delivery is not constant anymore but has a high frequency sine wave on top.
Now what you really want is to get rid of this sine wave shaped power delivery, and to do so matching the backemf of the motor doesn't help.
The sine wave has a very high frequency by the way (6 times the electrical frequency) and is typically not as bad as shown here, but still...
Getting rid of one harmonic, like the 5th as mentioned here, is relatively easy but what I want is to get rid of the 5th and 7th in one go...
all this is extremely nerdy stuff, but it's cool and fun to play with.
Quite soon after building the v1.00 chip I figured out that matching the backemf of the motor is not what you want.
Think about it, you don't really care about what the output voltage of the controller looks like. What you want is ripple free power delivery by the motor, no high frequency torque ripple or the noise from this.
Above is what I mean, the three curves in the bottom are the power delivered by each individual motor phase, all 3 add up to the straight line at the top of the figure. Straight ripple free power delivery is what you want.
The picture above is what you get when you drive a trapezoidal motor with a sine wave controller. The trapezoidal motor is modelled with 5th order harmonic only (there's also 3rd which cancels out, 7th etc etc). You can see power delivery is not constant anymore but has a high frequency sine wave on top.
Now what you really want is to get rid of this sine wave shaped power delivery, and to do so matching the backemf of the motor doesn't help.
The sine wave has a very high frequency by the way (6 times the electrical frequency) and is typically not as bad as shown here, but still...
Getting rid of one harmonic, like the 5th as mentioned here, is relatively easy but what I want is to get rid of the 5th and 7th in one go...
all this is extremely nerdy stuff, but it's cool and fun to play with.


 ?
?