Chalo said:
Sadly, your range of sacrificial junk pretty closely represents what today's cheap e-bike buyers are getting for their money.
Well, the aluminum fork on the left isn't too junky. They charged us $20 for that one, while the rest were all just $15 each.
Chalo said:
We may soon learn why they switched.
Well here we go! Results are in.
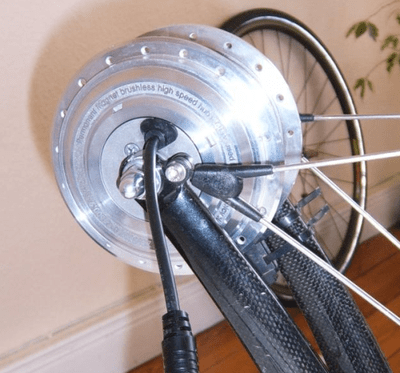
The first fork that we tested was the steel one with lawyer lips from the setup picture above. It's the kind of fork that most people wouldn't think twice about installing one of these hub motors on.

The results show no detectable axle rotation at all up until 50 Nm. After that, it started to give a little and then at 75Nm and 4 degrees was appearing to plateau . But then it got stiffer again and made it up to 95 Nm at about 7 degrees before reaching a true plateau.

There was quite a lot of resistance during continued rotation building up to 100 Nm before it finally started to roll completely out of the dropout at 40 degrees. We thought that something else in the jig might have been slipping at the ~26 degree point which is why the graph goes down and up as we let go of the arm to investigate before resuming once we saw that everything on the jig was fine.
In the end the dropout fully spread open and one of the lawyer lips was speared back as the axle eventually climbed itself right out of the dropout.

The next test was on an even older steel fork without lawyer lips. This one here

The spinout behavior was a little different. We saw some motion at 20 Nm which we presume was the axle rotating until the tabs from the anti-rotation washer were fully pressing against the base of the dropouts. After that, it got stiff again right up to 50 Nm, and then started to yield, reaching 90 Nm at just under 10 degrees and a peak of 104 Nm at 20 degrees. As the axle rolled out the torque dropped steadily downwards from here, unlike the fork with laywer lips that stayed up in the 80-100 Nm realm for the first 50 degrees of rotation.

The next test after this was on the aluminum road fork. This had a dropout thickness of 6.4mm, or 1/4". The steel forks meanwhile both measured at 5.2mm.

And how did it fair? The graph tells the picture

No motion on the axle at all until 45 Nm. Then it starts to give a little bit and at just over 50 Nm the dropouts start spreading open. Unlike the steel forks the resistance doesn't continue to increase to the 100 Nm realm, but maxes out at about 53 Nm for the first 20 degrees and then drops down as the axle rolls out.
Consistent with my previous tests, the aluminum fork dropout didn't break or crack but simply spread open just like the steel forks.

And here is that same test done as a time plot, so you can really see no motion at all for the first 10 seconds while we increased the force on the lever.

Bafang rates most of these small geared motors as having a max torque in the realm of 30 Nm, and if you were to limit the controller phase current so that the actual motor torque didn't exceed this I'd say you are in reasonable territory even with an aluminum dropout. That would correspond to a phase current limit on the order of 30 amps, plus or minus depending on the winding KV.
But if you are running the motors without a phase current limit and at power levels that are putting 40-50 Nm on the axle, then things are definitely right on the edge.
Next up, the two suspension forks! Anyone wanna take wagers on the failure torque with the magnesium Rock Shocks or the steel Suntour units? Here's a closeup of the dropouts in each case: