whereswally606
100 kW
I have a motor bike (emax scooter) should be fun 

Lebowski said:"sensorless full torque at standstill"






Make sure you get the correct gate resistors for the Fet you are using?


coleasterling said:If you come up with a heatsink design I'll gladly machine it and send them out to the other beta guys.


Lebowski said:TI has it (and is the only one I think) but as far as I know has not published how it works... plus figuring out for myself is more fun
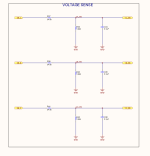
It's fairly mundane, note the 0.1uf caps after the voltage dividers on the phase voltage sense. I stumbled on to the impact it has by accident, I built a power stage that allowed me to switch between a VESC compatible MCU and Ti instaspin launchpads. The VESC has a nice GUI that allows you to generate graphs of the various analogue inputs, normally when running in FOC mode you get no useful data from phase v sense as you said, when I was running the VESC on the power stage with filtered vsense I discovered you could suddenly perfectly observer the sinusoidal BEMF voltages while running FOC. I'm not entirely sure how it works or what instaspin uses the data for, I think the capacitor basically holds the BEMF voltage sensed during the PWM deadtime until the ADC is triggered in the centre of the next PWM cycle, presumably this introduces a delay so the frequency of the filter must be known so as to apply compensation.Lebowski said:Tja, I don't really know what TI does with Instaspin. If you have a schematic somewhere I'd be interested to have a look...
What I have seen somewhere (but this is not FOC or rotor position detection at standstill) is that they integrate the phase voltages to get motor flux (as voltage is the derivative of motor flux). And then commutation is based on motor flux.
I don't do this as I drive all three motor voltages constantly... there's no point in measuring motor voltages if you supply them yourself by means of the output stage... I also try to stay motor parameter independent. One of the nice things that I have in my sensorless running is that it does not need to know motor parameters for the control loops to be stable. This means that for instance the Nissan Leaf motor from Arlo1's car runs with the same control loop parameters as Izemans MAC motor...