casainho
10 GW
- Joined
- Feb 14, 2011
- Messages
- 6,045
Great!! saw your comments on break code and it seems to make sense to me.hurzhurz said:I forgot to mention, I already tried without the LCD. Didn't chance much.
The weird behavior of it could be a side effect of a broken ground or backfeed problem... have to check...
I had a quick look at the brake code.
I guess $6b is used as a counter to debounce the input and the effective state is saved in $92 bit #4. Maybe you can try this one out?
Yeah, cadence looks hard... I already tried to understand it (that's why I said something about direction detection).
I had the hope it is somewhat similar to the speed...
I hope to test today $6b bit #4 for brake state.
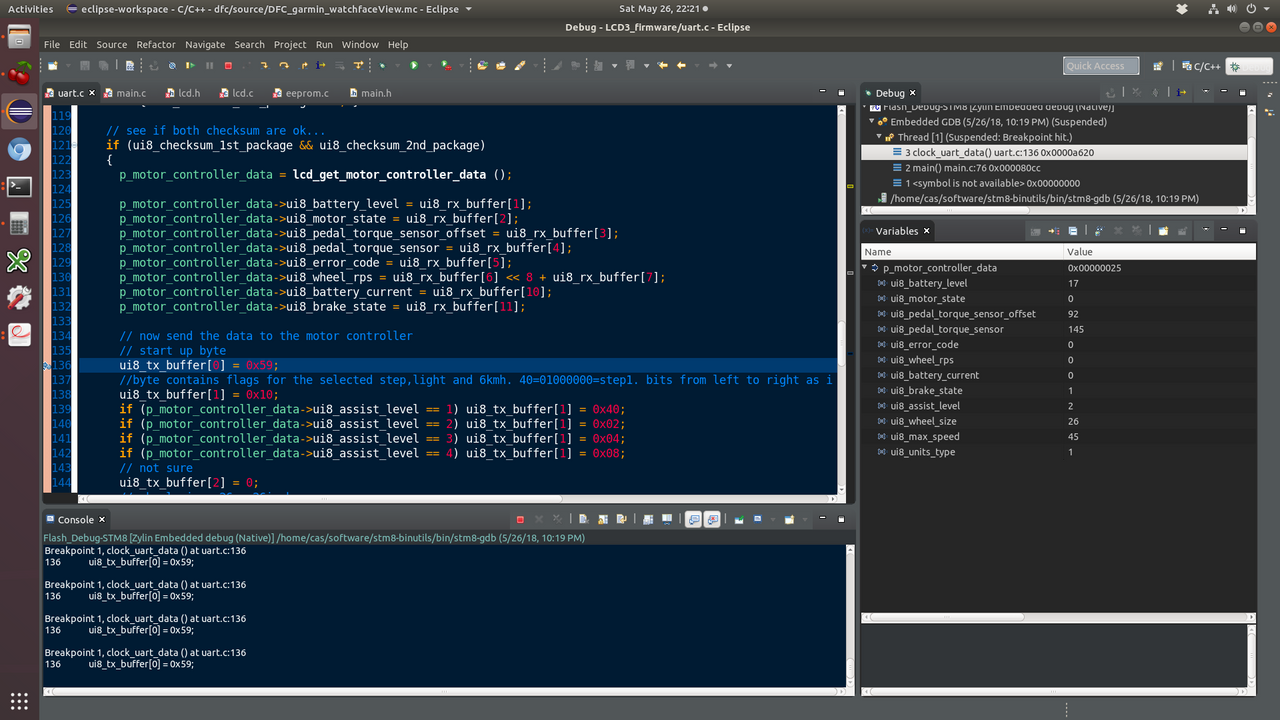
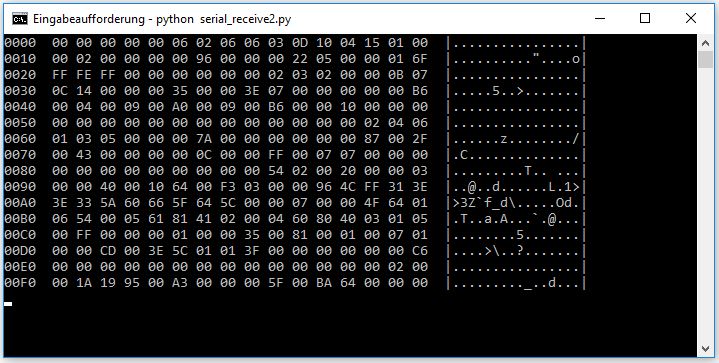
I am also ready to test our custom package on UART. You can implement it and I will test.
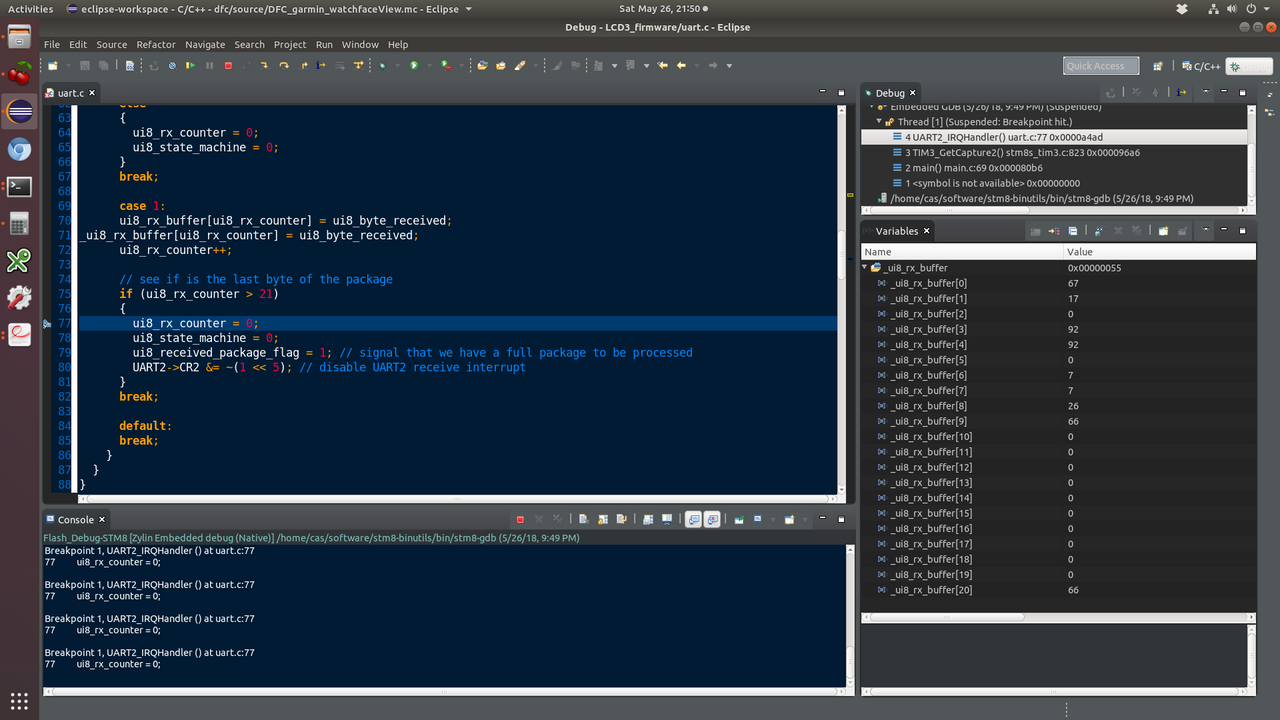
Also, for some reason, I always see checksum of the original package as 0...!!! I already verified and debugged my code but it seems correct.
")