flippy said:very nice.
are you not going to put anything to insulate the pouches from each other? just to prevent 1 pouch from going "off script" and taking out the entire pack...
some 0.5mil alu plate would do the trick.
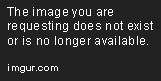
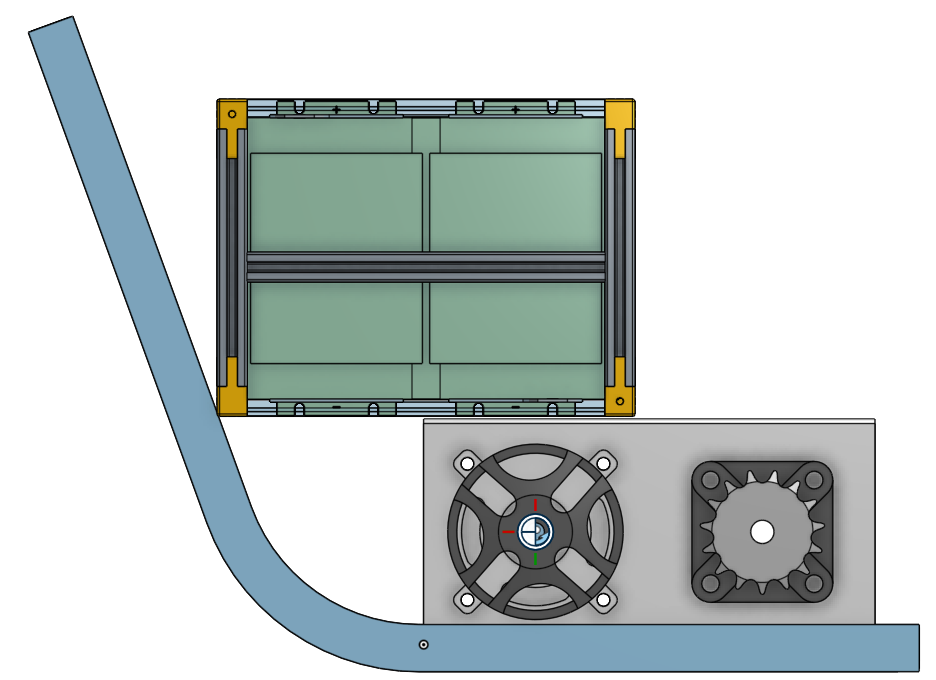
I was thinking about using some aluminum tape between the cells, but honestly between the crazy high ratings on these cells (that I'm only using 2/3 to 3/4 of), along with fairly neurotic monitoring (all cell group voltages, a couple temp probes at various points in the pack, clear battery case), I'm actually not that worried. I didn't bother modeling it (just modeled a .5mm offset), but the cells are going to be stuck together with 3M foam mounting tape.
It looks snug, but they've got plenty of room to expand if things get unhappy, and these don't let go violently. There's a video of somebody dead-shorting one with a current clamp and a thermal camera. 30-ish seconds of 350 amps causes the cell to puff before it reaches like 200 degrees and finally vents out through one of the crimped sides.
If I put any extra material in place, it would really only need to go in between the two cell stacks. If a cell blows in any other direction, it's either going to hit the aluminum busbar/plate, or the polycarbonate side of the battery box. I was kicking around the idea of cutting a relief into the crimped side so the cell would vent in a known direction if/when it puffs on me.
Also after I took some better measurements off the bike I decided to tip the pack on its side and turn it sideways. Everything fits much more nicely, although it does stick out about 2 - 2.5in outside the frame rails. That would make it bit wider than the radiator, but nothing that I can't compensate for by getting creative with the bodywork.
Sidenote: There's still room to add a few hundred 18650's down the road when I want to add some range.
")