qrisonline
1 mW
- Joined
- Oct 9, 2018
- Messages
- 10
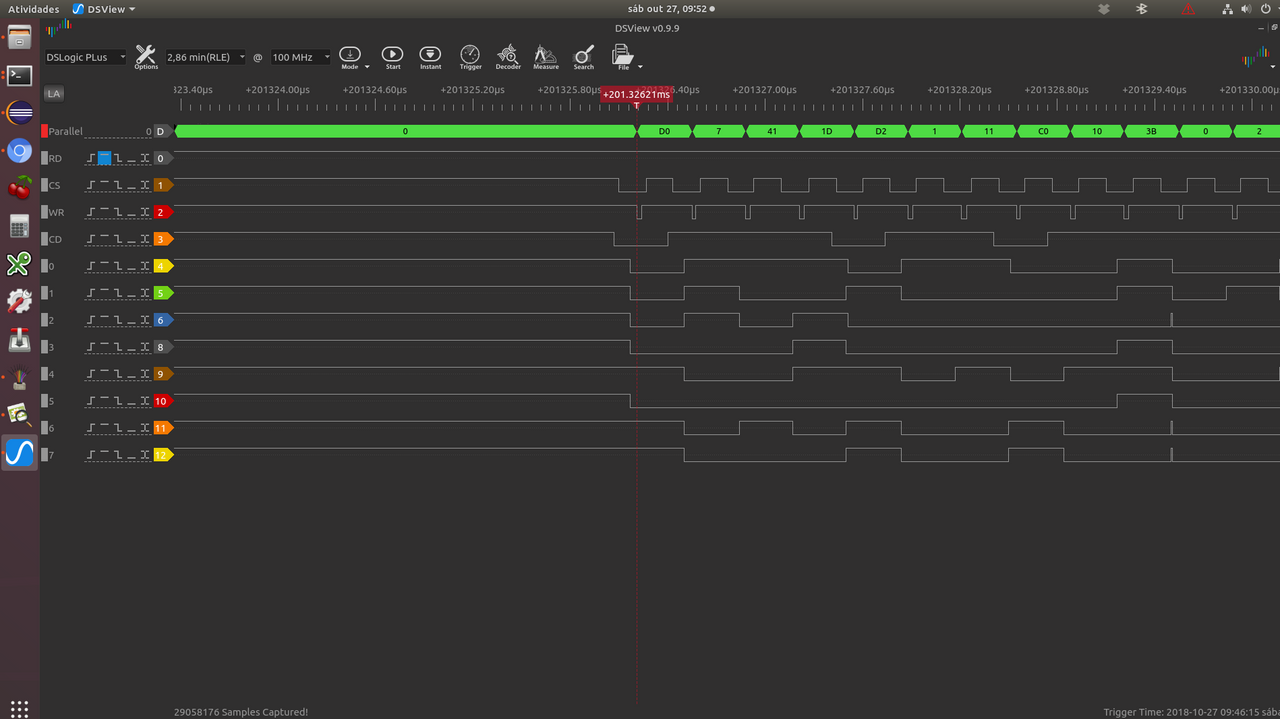
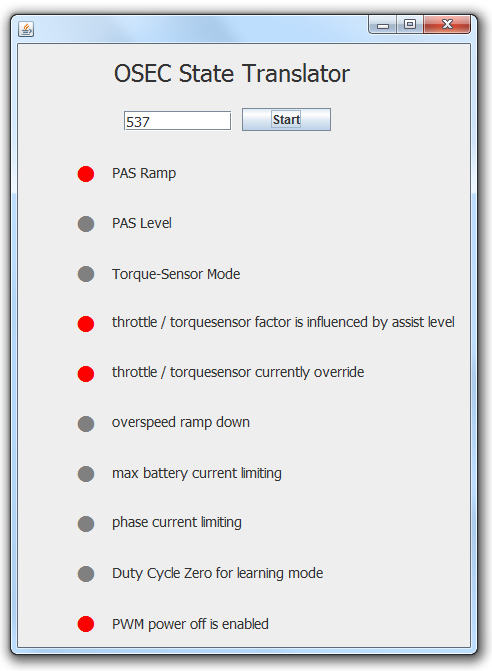
stancecoke said:qrisonline said:Okay sorry for being slow. My state was 537
For your convenience I've built a little tool to translate the status:
https://github.com/stancecoke/BMSBattery_S_controllers_firmware/raw/Master/OSEC%20State%20Translator.jar
regards
stancecoke
Nice I will try this tomorrow. When I continue with my controller setup.
Greetings Michiel

")