vailbiker said:I have the 36V volt TSDZ2 that I have been using for about a year. I love the system and am really looking forward to running the open source firmware. I have hit a road block while trying to flash the LCD3. I'm using STVP 3.2.7 right now but have also tried the latest version. Every time I try to communicate the the LCD3. I get a message that says "Cannot Communicate with the device ! Check the SWIM cable connection and check all the needed pin connections on the SWIM connector." The display powers up and I am able to communicate with the ST-Link which I verified by running the upgrade ST-Link utility and clicking on device connect. It reads the firmware version as
V2.J16.S4 JTAG+SWIM Debugger.
Things I've tried so far:
Setup software and hardware on a completely different Windows 10 workstation
Replaced the clone ST-Link V2 with a new one
Shorter cables between the LCD3 and ST-Link - currently at 6 inches
Plug ST-Link directly into USB port on computer without an extension cable
Different versions of STVP
ST-Link drivers
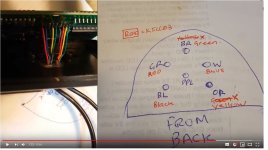
Triple checked wiring using https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki/How-to-flash-the-Flexible-OpenSource-firmware-on-KT-LCD3 and Jbalatutube's youtube video.
Does anyone have any other suggestions for troubleshooting? Thanks!
Hi,
I had similar problems when I tried to flash the open source firmware to my bike. :wink:
First of all, I have to say that the imaging in the wiki is partly incomplete and that you have to look at the plug layout carefully from several videos and sources together to get all the connections working - and maybe this is your problem as well. I do not know how complete your information is. Then it was a problem that the v2 clone was not working well. After I bought another one and tried another dealer too, I've got a different clon, that is different with the swim/gnd pin assignment. Maybe the pin assignment printing from the first clone is wrong - I've not checked it so far - just some cheap chinese scrap to throw it into trash..
I hope this helps you any further.
") I could run some tests from the master branch if some more validation is needed.
I could run some tests from the master branch if some more validation is needed.