1N4001 said:
Cool! My goal of running 1200W through this motor might be achievable after all

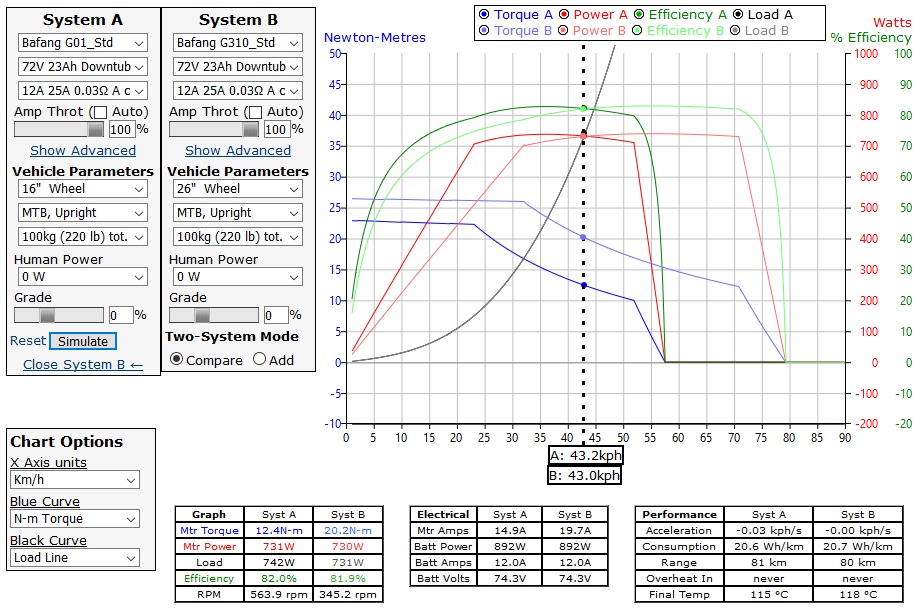
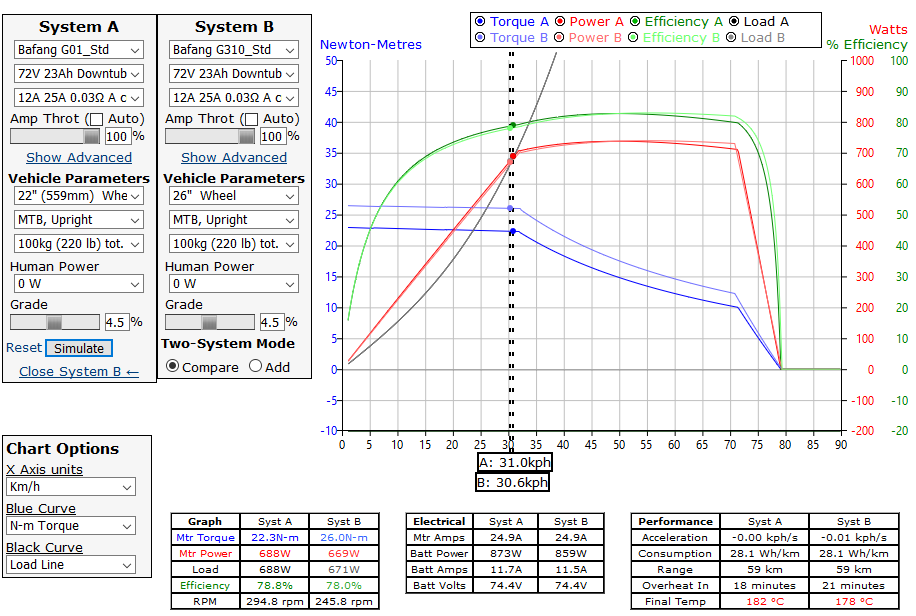
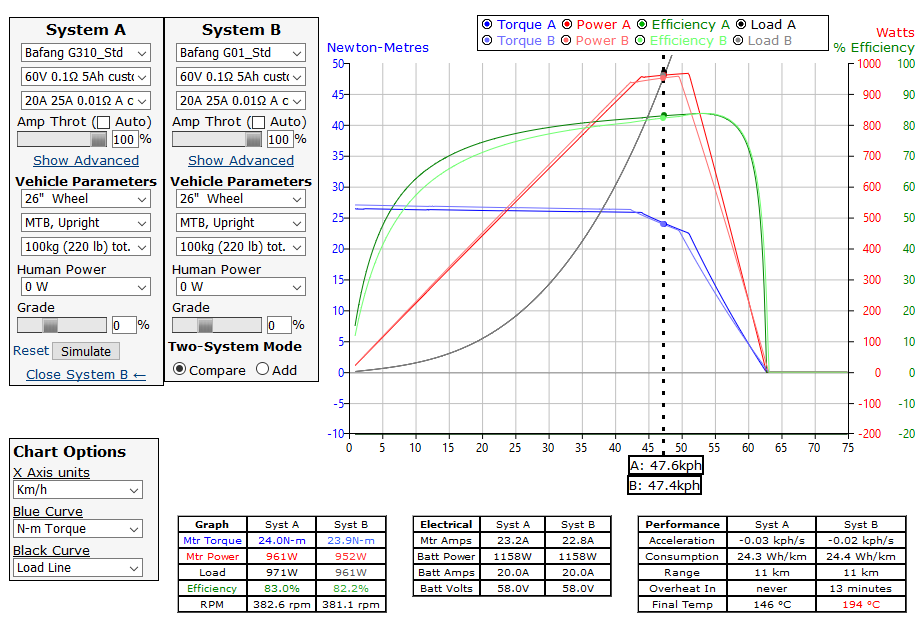
At high speeds (50+ kph) it's actually pretty realistic to continuously do ~1200 watts of input power, ~1000 watts of output power, with the motor in the 20-22 Nm torque range. 1200 watts at lower speeds like 25-30 kph requires a motor torque that is quite near the mechanical limits of the plastic gears.
If you don't mind, where exactly did you place the core sensor for these tests?
Glued to the windings right here.

You can also see how easy it is in general to pass through some extra sensor wires beside the main motor cable once you disassembly the motor remove the wire side axle stub. Then it's just a straight line diagonal hole and you can use a jewelers scredriver or similar to make space beside the phase cable to tuck the temperature signal wires beside it.
Did you notice any increase in drag?
The normal method that I use to measure the drag with Statorade testing in a direct drive motor is by measuring the no load current draw of the hub motor. That doesn't work as directly in a geared motor since it includes all the core losses which wouldn't be present when you are just pedaling the hub with no power. In this particular case, the no load power consumption
decreased rather than increased with the addition of ATF. For instance at 350 rpm with no fluid, the unloaded current was 1.18 amps. After adding 50mL of transmission fluid, it dropped to 1.03 amps.
I can only conclude that the oil in the motor has washed out and dissolved much of the bearing grease and gear grease, lubricated the shaft seals, and that this more than offset the additional viscous drag caused from the oil sloshing around.
How did you fill the motor,
I did my usual trick of drilling one of the disk bolt holes all the way through and then used a syringe to inject it after the motor had been reassembled, and closed that hole with a small M5 bolt while the tests were underway.
View attachment 3
View attachment 1
If I was doing this on a bike and not needing to incrementally add small amounts of fluid for the sake of knowledge and science, I'd just open up the side plate, pour in the fluid, then screw the side plate back in place. The motors open up this way quite easily, and you don't have to worry about resealing the side cover since there is an o-ring around the perimeter of the side plate that seals it for you.

and did you experience any leakage through any of the seals? Did you clean out the gear grease beforehand or did the oil wash it out on its own?
Surprisingly and pleasantly there has been zero leakage at all yet, with about 35 hours of cumulative running so far. But the motor is just upright and not bouncing around like it would on an actual ebike, If you tilted it on it's side I'm sure it would leak right through the cable exit since I made no special effort to seal that after passing through the themistor wire.
Still, the fact that there's been any leakage visible on the wind tunnel is really promising that the stock shaft seals and O rings on the G310 motor are gonna be up to the task.
Since you seem to be using ATF, I'd also be interesting to see if it attacks any seals, cable insulation/enamel or the gears.
I'm really interested in this too. The only reason that I'm using the transmission fluid for this thermal characterization is because I had some on hand from previous motor experiments not because its necessarily the best suited for long term rubber/chemical compatibility. For that it's been suggested that a lightweight pure synthetic gear oil would be more appropriate than whatever concoction of chemicals goes into ATF.
So don't consider these results as some endorsement of ATF in particular. I think all cooling fluids would perform almost exactly the same thermally. Then there's a separate task to see of all the liquids out there which ones can be safely poured into a hub motor with the least adverse affects on the gears, ball bearings, wire insulation, rubber seals etc.
That's not something I plan to do but am hoping that armed with this test info, others will be encouraged to try things out and report back if they notice any compatibility issues in the long term.