casainho said:Although I got the sequence, I may be doing something wrong on the code... Maybe you can look at it. Look at 850C init code to compare, as it is similar idea.
By guessing I mean try to find other codes where init codes are similar.
So after some digging on the internet I think we have an SH1107 controller. I compared this init code (line 571 and following):
https://github.com/micooke/sparkfun...3975c3c73a57fda14be3/src/SFE_MicroOLED.h#L571
with your init code and it fits quiet well although some are missing or different. You can find some comments in this text file:
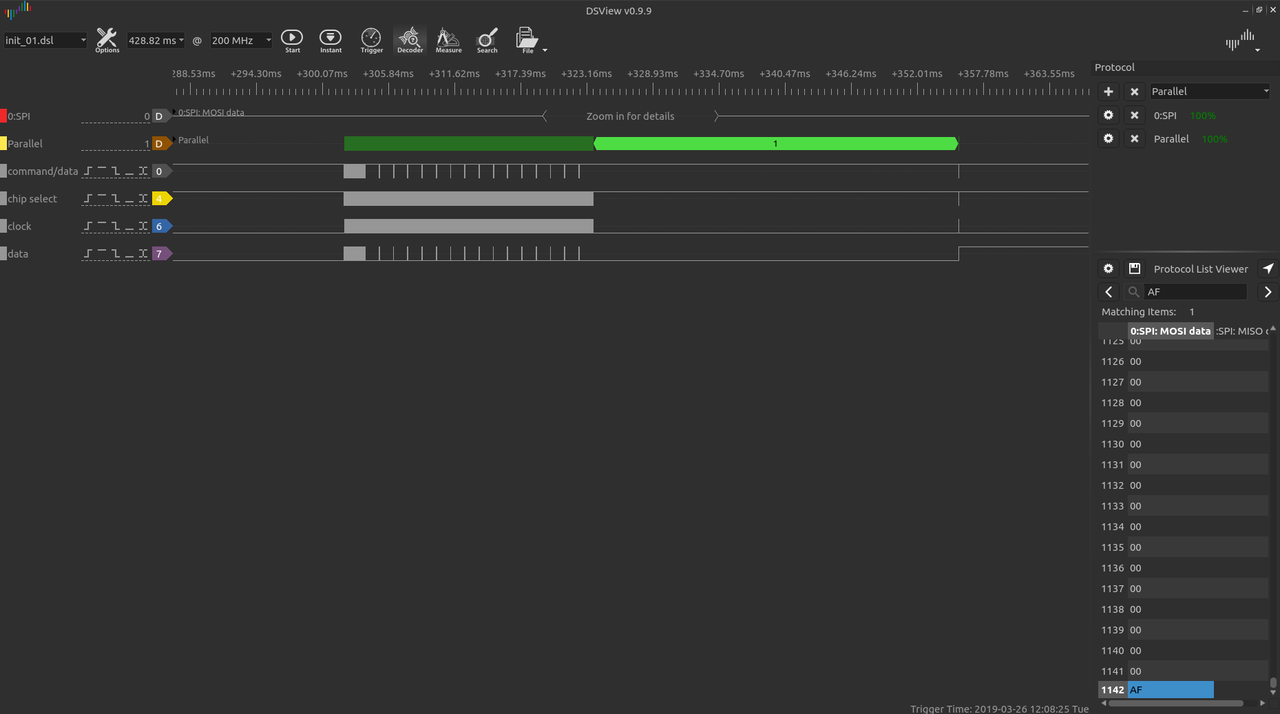
I do STM32 F0/F1 development for living but never get in touch with display programming and initialization. So you are for sure more competent. If I have to guess, I miss the command 0xAF (display ON) at the end of your init code and I also read that timing is crucial during initialization (but I don't see any wait states in the other code) and after initialization (the other code waits for 100 ms).
U8G2 Library supports SH1107 also:
https://github.com/olikraus/u8g2/blob/master/csrc/u8x8_d_sh1107.c
The SH1107 Datasheet:
https://www.displayfuture.com/Display/datasheet/controller/SH1107.pdf