jimmyfergus
100 mW
- Joined
- Jul 17, 2018
- Messages
- 49
buba said:I have added so many functions and optimized so much space it is insane. But there is a limit. Trying to make the firmware react so good that we do not need Startup Boost and get some space back.
I definitely think Boost seems like a band-aid that can be discarded if you improve the responsiveness. Personally I would be very happy to see it dropped. It seems to be a frequent pattern with control systems that they accumulate band-aids to try to fix behavior where if you get back to the fundamentals you can avoid them altogether.
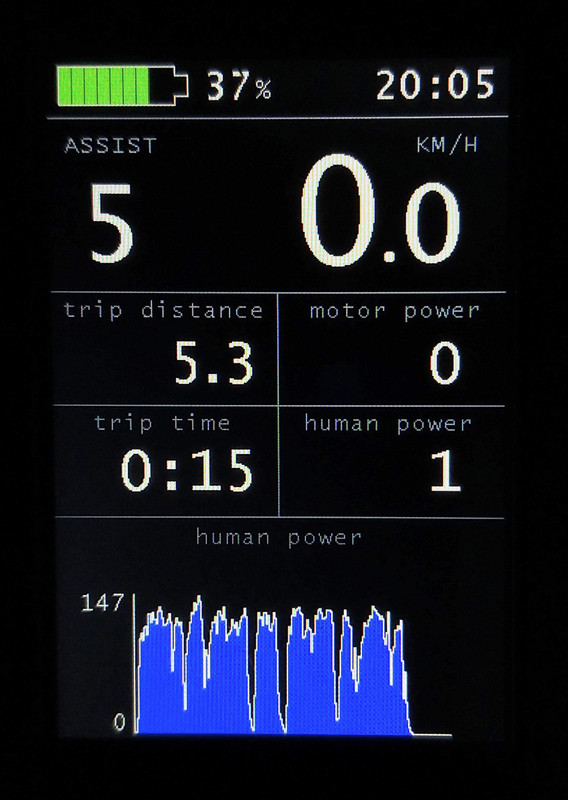
I'm assuming that you're also improving the slow-down responsiveness. In 0.19 the run-on is pretty strong, feels like ~1s after stopping pedaling, and to me at high assist even feels like a ramp up and then sudden stop. This is a problem for me with an internal gear hub, where gear shifts are very abrupt - unlike a derailleur when the chain ramps between cogs - I'm pretty sure if my shift comes through under power I'm really stressing that poor blue gear, but avoiding it means a very long, slow gearshift.
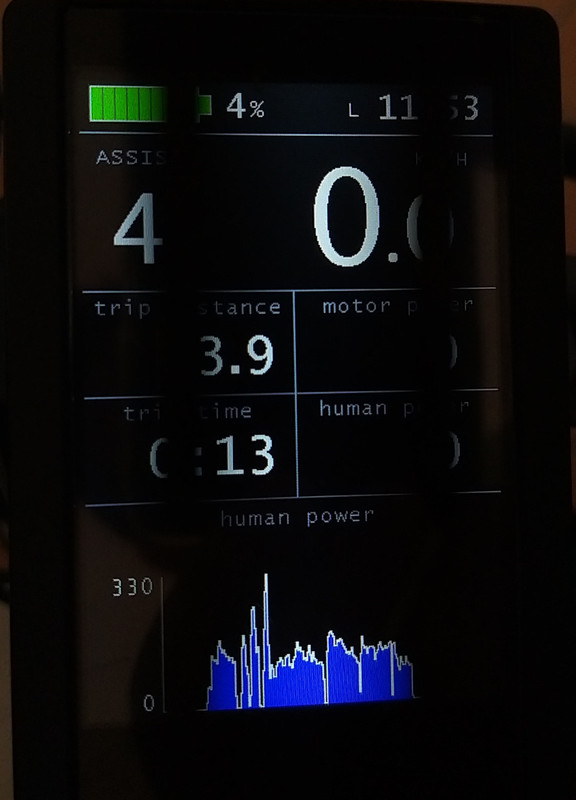
I'm also hoping whatever causes set-off to lag sometimes will go away. I'm not running a brake cut-off at present, and I'm not sure if that contributes, but a lot of times I get nothing much for the first revolution or two on set-off, and then a slow ramp-up. I think it's related to having a foot on the pedals when stationary.
I'm looking forward to your new beta - though I'll probably be on vacation.
What recommended sdcc version works for the codebase? I tried a few and got various SEGVs and other issues during compilation.
Thanks for your efforts!


") and force applied upwards on the pedal at the back (right).
and force applied upwards on the pedal at the back (right).