Finally we own the TSDZ2 torque sensor!!
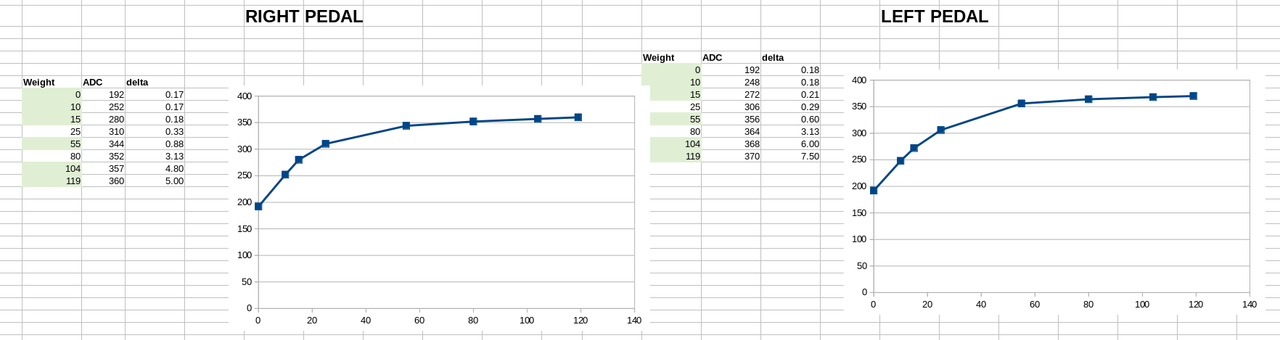
Up to now we were reading the torque sensor in a wrong way and it could only measure up to 25 kgs. Also there is a big different from the values read on left or right pedal. This are the output values of my torque sensor (that I bought 3 weeks ago):
I implemented the linearization of the torque sensor measures and it can now measure up to at least 102 kgs (which is my weight). I also implemented a linearization based on a table with values for left and right pedal and it works very well: before my right pedal was measuring the 102 kgs of my weight but left pedal would measure only 70 kgs, now both pedals measure the same values.
Before my display was showing to me a value of pedal human power of a bit more than 100 watts, no matter the force I did and now, I can go up 400 watts for short peaks. I think strong cyclists will love to see their real pedal human power on the display!!
And by the way, I am pretty sure there is no need to calibrate the sensor as I did before, no need to open the motor and adjust the hall sensor position of the torque sensor.
Calibration process
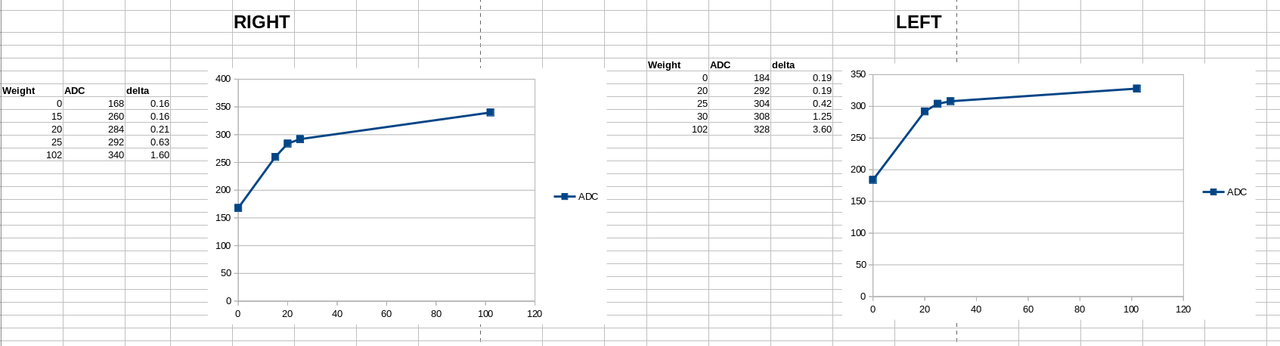
1. user put values on right pedal, starting at 5 kgs, in steps of 5 kgs up to about 30 kgs. Finally put itself on the pedal with his known weight value. The pair of weight and torque sensor ADC value should be registered and later user will need to decide for 5 points only, 1 at start, other at the last value and 3 values near the knee on the graph, as shown on the graphs.
2. Repeat for left pedal.
3. Put the pair values of weight and torque sensor ADC values, for each pedal, on the specific LCD configuration menu.
One important thing for all this work is that at system power up, the right pedal should be pointing to ground -- as there is the need to identify which pedal we are doing the force and there is no way to identify them, I decided to do like this, having the pedal at a known position at startup and after that everything will work well.
I have the code working on my bicycle and I can see on the LCD the weight value in kgs on the LCD. The tables for linearization are for now hardcoded on the firmware, I can't setup them yet on LCD. When we have the next version of firmware I can add this feature to it.

")