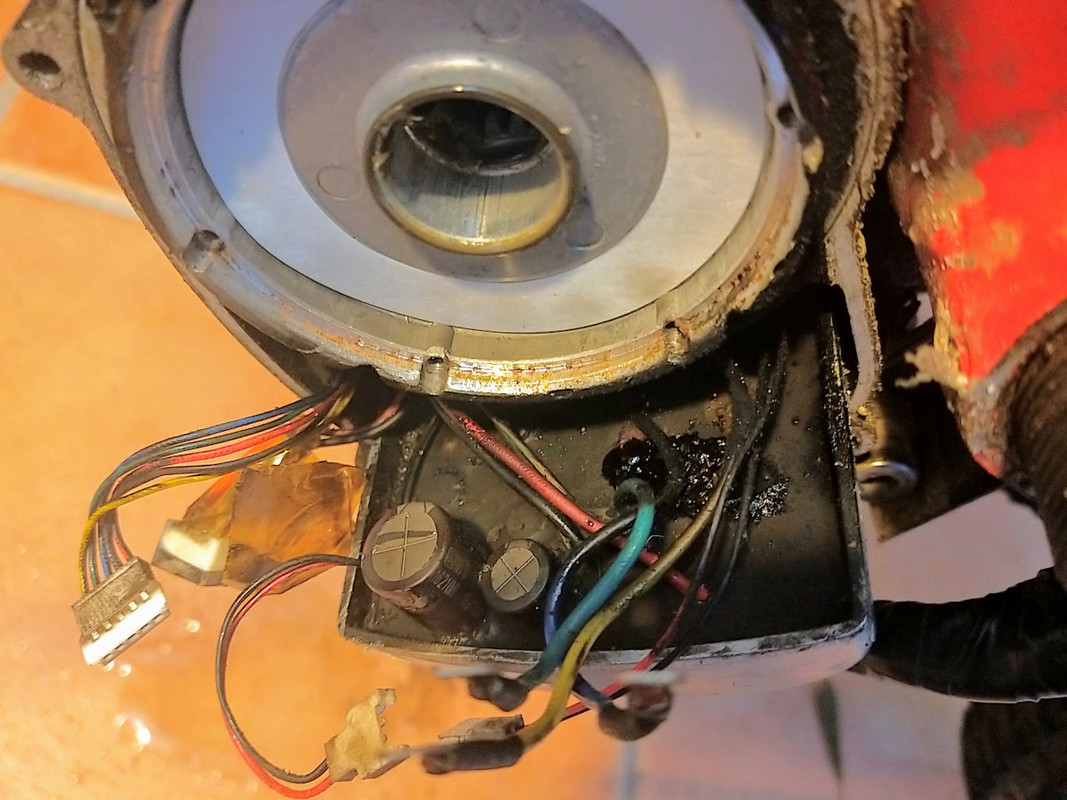
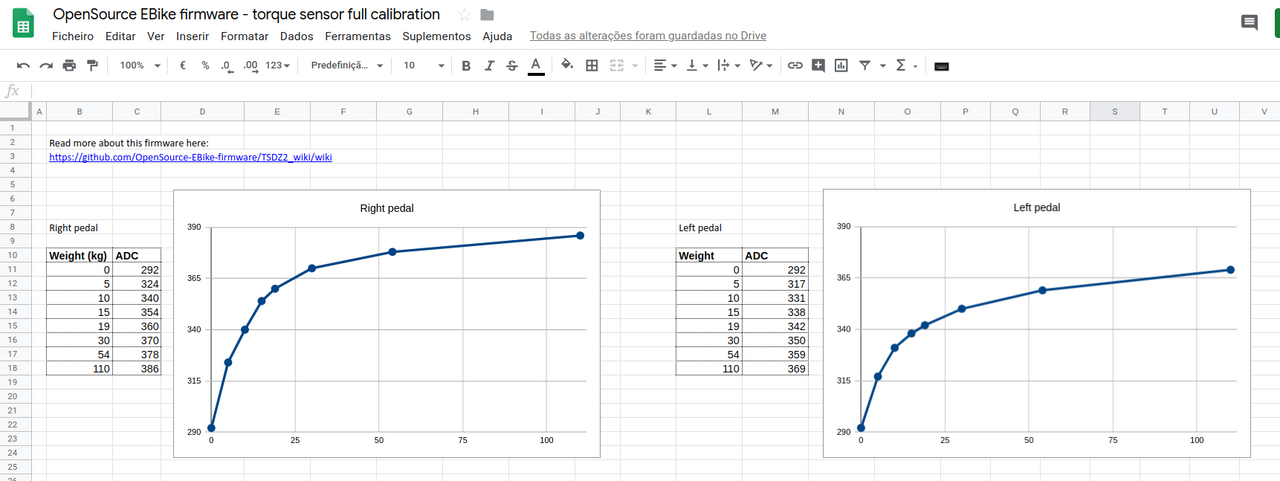
Finalmente sono riuscito a capire perché ci sono differenze di potenza tra motore, ho tre motori che uso, ma solamente uno eroga potenza da vendere, questa cosa non riuscivo proprio ad accettare, oggi grazie a Mbrusa che ha permesso di leggere il valore del sensore di torque posso affermare che i motori sono tutti uguali ma la differenza la fa la lettura del sensore che poi trasmette i dati alla centralina e di conseguenza eroga potenza.
La potenza che poi riscontriamo quando si utilizza la bici, e ci fa capire le differenze di spinta tra motori.
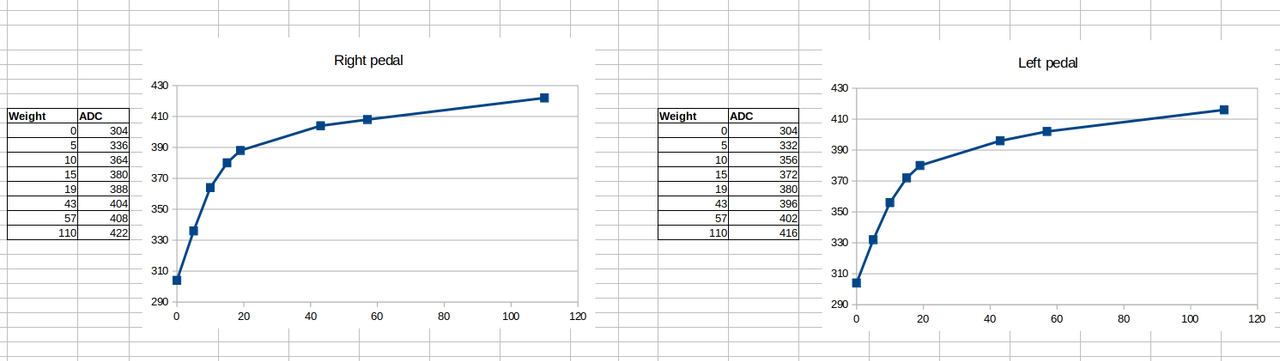
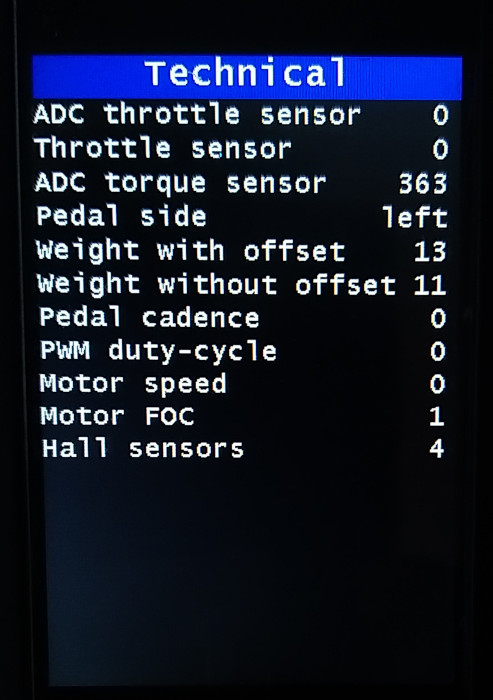
Vi posto quattro foto,
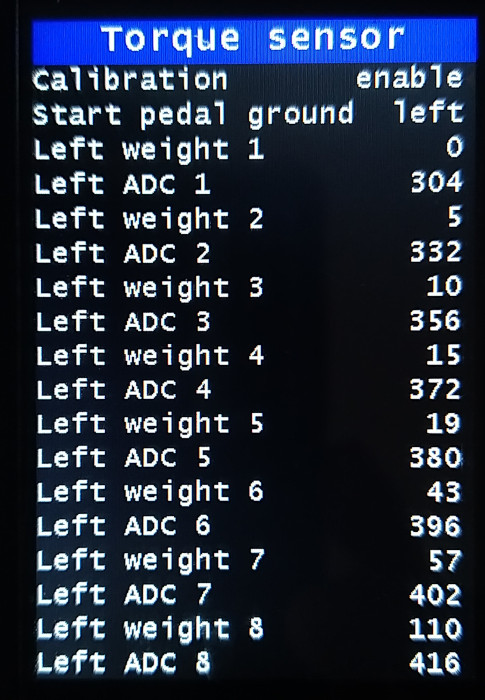
due dove si legge il valore a pedali orizzontali a vuoto,
e due in piedi sui pedali imprimendo la forza massima.
Ovviamente il sensore che legge 99.3 eroga molta potenza.
@ Casainho,
secondo la tua esperienza
è corretto che con 99.3 il motore raddoppia la potenza?
Grazie
La potenza che poi riscontriamo quando si utilizza la bici, e ci fa capire le differenze di spinta tra motori.
Vi posto quattro foto,
due dove si legge il valore a pedali orizzontali a vuoto,
e due in piedi sui pedali imprimendo la forza massima.
Ovviamente il sensore che legge 99.3 eroga molta potenza.
@ Casainho,
secondo la tua esperienza
è corretto che con 99.3 il motore raddoppia la potenza?
Grazie



")