
jeff.page.rides
100 W
- Joined
- Aug 13, 2019
- Messages
- 295
Is there a TSDZ2 Manual for the 850C v51?
jbalat said:casainho said:And I did saw your video and I known because I did the development that the latest version of 0.51.0 has improvements on the issues you did show in the video. So my suggestion to everyone is to update to the latest version.
Hi Casainho, I have been trying to keep up too.. as you know I have the KT LCD3 and I'm on version 20 beta 1 which I'm really happy with. I thought the new version 0.51 now only supports 850c display correct ? From my reading it seems the 850c code isn't as mature as the lcd3 yet ?
If so Is there any way to get it to work on the LCD3, I would love to try 0.51..?
buba said:Changelog from the stable 0.19.0:
- Smoother motor torque control
- Overall faster acceleration, much more responsive and more adjustable/customizable
- Named the previous riding mode Power Assist
- Introduced Torque Assist, Cadence Assist and eMBT Assist
- A new automatic calibration process for the cadence sensor
- A new Advanced Mode for the cadence sensor with quicker response times
- A new light mode configuration where users can choose to enable/disable/remember light state through a power cycle
- External light configuration where users can configure the lights to flash, brake-flash when braking and much more!
- Startup without pedal rotation now with adjustable torque threshold
- Improved the KT-LCD3 firmware and updated it to be able to communicate with the new 0.20.0 motor controller firmware
- Added an adjustable button debounce timer for Walk Assist.
- Added a slight button debounce timer for Cruise
- Improved Walk Assist with soft-start
- Improved Walk Assist and Cruise safety
- Cruise much smoother and accurate
- More customizable Street Mode
- Smoother motor control to prolong life of the blue and metal gear
- Brakes now immediately disable the motor
- TSDZ2 coaster brake version can enable system braking by applying backwards torque
- More error codes/states that make the firmware safer to use and protects the hardware
- Higher resolution on the torque sensor output and increased operating range
- Better system calibration during startup
- Adjustable ADC torque conversion for accurate human power in the operating range of the TSDZ2 torque sensor
- Much more accurate data displayed on the KT-LCD3 with a new highly adjustable filter
- Better filtering used in the motor controller firmware
- Improved EEPROM controller
- EEPROM "Reset to defaults" and other functions now operate as intended
- New and improved wheel speed sensor and cadence sensor code
- Improved ADC conversion accuracy for current, voltage and therefore wattage and watt-hour measurements
- Changed and simplified configuration menu (KT-LCD3)
- Added new symbols for readability (KT-LCD3)
- Solved bugs with the TSDZ2 Coaster Brake version
- Backwards motor rotation is now detected and displayed as 0 ERPS
- System changes responsiveness depending on wheel speed
- Extensive refactoring throughout the entire system
- Simplified code for future development and display support, highly modular
- And much more... See the 0.20.0 wiki for even more information!
jeff.page.rides said:Is there a TSDZ2 Manual for the 850C v51?
stefkrger said:Today I had a scary experience with the stable 0.19 FW and a SW102 display. While I was riding I noticed the motor was constantly giving assistance even though I was not pedaling. Display showed some error message (only thing I remember it had a file state.c in it). I tried to turn off the system on the display but it did not react. I have the TSDZ2 without throttle and so no power cutoff break levers either.
Luckily I was driving through a park so I could let the wheel spin on the wet grass while I disconnected the battery. That was the only way to stop the motor.
Has anyone experienced something similar? I imagine this can be quite dangerous.
After a restart everything seemed to be back to normal.
dameri said:jeff.page.rides said:Is there a TSDZ2 Manual for the 850C v51?
Here: https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki/Features-and-configurations-on-display
jeff.page.rides said:Then I shut off the system pulled back on the pedals against the coaster brake to the position that my derailleur is in when it feels best when I’m riding. I measured the pull force at about 50 kilograms and tried it again. Now after pulling back 50kg as the system boots when I ride on the rollers, it didn’t matter which setting I was in, which gear I was in or what cadence I was at even down to 25 rpm or cadence
it was very smooth. I could ride at 2.0 and it had more power than before at 6.0.
If I pull less than this my system doesn’t have enough power for me and if I pull more than this the system wants to run. And I need to stop the rotation, it doesn’t take a lot of effort to stop rotation but if I don’t stop the rotation it will continue to go forward.
Thanks, Jeff
Because all torque sensors on TSDZ2 are different, and some are bad in sensitive, you only get the best results if you use the latest firmware version and do the torque sensor full calibration. Also the last firmware version has improve torque sensor sensitivy by 4x and also the current control by 4x, so you will have much better experience with the latest firmware on the difficulties you are having.Waynemarlow said:If I pull less than this my system doesn’t have enough power for me and if I pull more than this the system wants to run. And I need to stop the rotation, it doesn’t take a lot of effort to stop rotation but if I don’t stop the rotation it will continue to go forward.
Jeff its very easy on the LCD3 to set your own levels of power, have a look at the user manual
I don't understand. The latest version is not V19 anymore, is version V53 and is much better.Waynemarlow said:Now there's also a whole lot of nice features in the V20 which is way better than the V19, it would be pretty cool if you could incorporate the latest V20 with your software torque sensing as now that would be pretty cool.
I think the problem may be his torque sensor lack of sensitivy, and then he needs to setup a very high assist level multiplier and then he looses sensitivity at startup -- hence the dangerous situation the motor doesn't not stop if he reduces the force with arms, meaning bad experience, no good torque sensor, more like a PAS or on/off throttle system.Waynemarlow said:Casainho, I agree that you can get a rogue torque sensor, but I think Jeff may well just need to set up the power output to his requirements which even with a rogue sensor he should be able to do, just the linear ramp of the sensor may not be the best.
If I pull less than this my system doesn’t have enough power for me and if I pull more than this the system wants to run. And I need to stop the rotation, it doesn’t take a lot of effort to stop rotation but if I don’t stop the rotation it will continue to go forward.
Indeed the latest firmware is the v0.53 with many interesting stuff, I think the main stopper to update to it and try is that many of us already wired the LCD3 and after all it is a good display that includes all the necessary data. In my opinion many users would prefer to keep that one instead of the 850c. Personally I would consider the smaller sw102 rather than the "bulky" 850c.casainho said:I don't understand. The latest version is not V19 anymore, is version V53 and is much better.
I think V053 is much better than V20. But please make a list, after testing and comparing each feature, give details and prioritize the items on the list, then I can see what I can bring from the V20, if anything relevant.
Waynemarlow said:jeff.page.rides said:Then I shut off the system pulled back on the pedals against the coaster brake to the position that my derailleur is in when it feels best when I’m riding. I measured the pull force at about 50 kilograms and tried it again. Now after pulling back 50kg as the system boots when I ride on the rollers, it didn’t matter which setting I was in, which gear I was in or what cadence I was at even down to 25 rpm or cadence
it was very smooth. I could ride at 2.0 and it had more power than before at 6.0.
If I pull less than this my system doesn’t have enough power for me and if I pull more than this the system wants to run. And I need to stop the rotation, it doesn’t take a lot of effort to stop rotation but if I don’t stop the rotation it will continue to go forward.
Thanks, Jeff
Jeff its very easy on the LCD3 to set your own levels of power, have a look at the user manual
https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki/0.20.0-%28DEVELOPMENT%29-%7C-KT-LCD3-%7C-TSDZ2-%7C-Manual
and you can set all the parameters to your own configuration, the default ones are just a guide and a starting point. As I have said before, set your display to output Motor Watts and then ride it on say the rollers, taking note of what Watts is comfortably best for you. I then set up a level, say No 5 to match that output. The others I scaled up and down to slightly overlap to give a bit of scope for those days you want a bit of a "blast " and some less to give me a workout.
Its not to difficult and you should be able to customise your engines output to your requirements without having to frig the system by pulling back on the cranks at start up unless there is some software gremlin in there that we are not aware of.
KT-LCD3 firmware development is frozen, no point discussing issues that were already solved and/or improved on latest firmware version, that could only be developed because the project moved forward.thineight said:Indeed the latest firmware is the v0.53 with many interesting stuff, I think the main stopper to update to it and try is that many of us already wired the LCD3 and after all it is a good display that includes all the necessary data. In my opinion many users would prefer to keep that one instead of the 850c. Personally I would consider the smaller sw102 rather than the "bulky" 850c.
Since the latest stable firmware for LCD3 is the very good v.20 I see the point that many of us would like to keep that release alive, to be discussed on the new post dedicated to the LCD3.
thineight said:Indeed the latest firmware is the v0.53 with many interesting stuff, I think the main stopper to update to it and try is that many of us already wired the LCD3 and after all it is a good display that includes all the necessary data. In my opinion many users would prefer to keep that one instead of the 850c. Personally I would consider the smaller sw102 rather than the "bulky" 850c.casainho said:I don't understand. The latest version is not V19 anymore, is version V53 and is much better.
I think V053 is much better than V20. But please make a list, after testing and comparing each feature, give details and prioritize the items on the list, then I can see what I can bring from the V20, if anything relevant.
Since the latest stable firmware for LCD3 is the very good v.20 I see the point that many of us would like to keep that release alive, to be discussed on the new post dedicated to the LCD3.
By the way.. I did not find the new post that andrea104kg should have opened few days ago, can anybody share the link?
casainho said:Because all torque sensors on TSDZ2 are different, and some are bad in sensitive, you only get the best results if you use the latest firmware version and do the torque sensor full calibration. Also the last firmware version has improve torque sensor sensitivy by 4x and also the current control by 4x, so you will have much better experience with the latest firmware on the difficulties you are having.Waynemarlow said:If I pull less than this my system doesn’t have enough power for me and if I pull more than this the system wants to run. And I need to stop the rotation, it doesn’t take a lot of effort to stop rotation but if I don’t stop the rotation it will continue to go forward.
Jeff its very easy on the LCD3 to set your own levels of power, have a look at the user manual
Nice job!casainho said:OpenSource EBike app, for TSDZ2 and SW102 display
My wife and me, we were discussing the mobile app design. It is way easier to replicate what is already done on 850C. Here are the wireframes, showing a possible design. Everything is still in development, everything still can change:
[youtube]0rlo1Xn28W0[/youtube]
My wife repository on Github: https://github.com/aleixonunes/eBikeOpenSource
I don't have a throttles on my ebikes so I can't develop. But I think you can improve by reducing the current ramp value and also the motor max current value. Keep the battery current at a value you wish, like for instance 16 amps.ezrider1199 said:Hi - I just upgraded to the latest 850c and motor firmware (came from lcd3). While i briefly had 0.20beta i noticed it had a very gentle throttle initiation whereas 0.52 goes *clank* in the drivetrain/gear/slack when i press the throttle.
It is not PAS, what you change are the assist levels.ezrider1199 said:Also was wondering if it's possible to speed up and smooth out UI actions and button responsiveness? there seems to be a sort of inconsistent lag between button press and UI action. Just wondering as I like to quickly change PAS and its hard to run through the pas numbers through quick button presses. Thank you
ezrider1199 said:Hi,
I received a 850c from pswpower and am trying to flash it. I noticed it doesnt fit into my 4-1 cable because it came with a female end so i attempted to put on a new male connector (luckily had a spare). Cut it up and see that the colors are off and the pin positions dont match with what tsdz2 is expecting. So I tried to figure out and match up the pins according to this.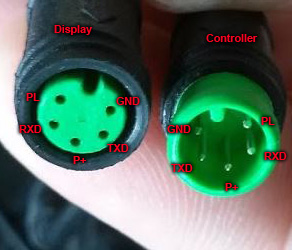
Here's where I am now
.
Currently I am able to plug an unflashed 850c to my controller and see it start up but I can't get it to flash... is there anything i can verify? I assume that because the 850c can startup that my wiring should be ok. The APT program doesn't show much in the way of errors. Thanks
Tsdz2 display --> 850c
Gnd, Black --> black
Batt V+, Red --> purple
Rx, Yellow --> white
Tx, Green --> green
5v, Blue --> orange
izeman said:Thanks. And Vin/Orange is same voltage as Brown wire? And for programming, does it need Orange or Brown wire to be powered? It's hard to see from pictures.redwater said:VIN - orange
Rx - white <--- Tx from UART
+26-54V - brown
Tx - green <--- Rx from UART
GND - black
Colours from 850C cable ofcourse.
")