Waynemarlow
10 kW
Thanks guys I'll keep endeavoring to get this to run.
Elinx said:Till there is a working Gui I have made configuration sections in the English Google translation and improve the layout a bit.
EN-Parameter-Config.h-guide-TSDZ2-mb.20beta1.A.pdf
Have you seen the display operation manual too? That one I have translated too.elfnino said:......
:thumb: thanks for the EN translation !
However it is not clear how to activate Walk Assist or Cruise mode on VLCD5.. there is just recommendation to check original manual of the display but there isn't such thing..
 Thank you for the hard work!
Thank you for the hard work!DavyWavy66 said:"loading file option_no_prot.ihx in option byte image in computer"
stancecoke said:DavyWavy66 said:"loading file option_no_prot.ihx in option byte image in computer"
Ah, again an issue of my .gitignore settings. I just fixed it at github. Please download the repo again, it should work now!
https://github.com/stancecoke/TSDZ2-Smart-EBike/commit/9920098a4251dd72e4d271157c45909c5fe54be1
regards
stancecoke
Elinx said:stancecoke said:.....
The configurator works now for the basic settings. I think it is mostly self explanatory.
https://github.com/stancecoke/TSDZ2-Smart-EBike
.......
For people who want to bring the advanced settings into the GUI.......
Till then I have re-arranged the configuration guide for basic and advanced settings.
EN-Configurator -TSDZ2-mb.20beta1.A.pdf
But in the official VLCD5 manual I could not find any WALK ASSIST or CRUISE dedicated button.. so which button is it ?Activated with the dedicated button, consult the manual of your display
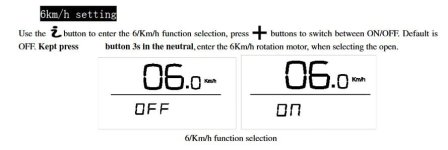
In settings the name for walkassist is 6km/h on offelfnino said:...... in the official VLCD5 manual I could not find any WALK ASSIST or CRUISE dedicated button.. so which button is it ?
ilu said:Does anyone know if it's possible to add a brake sensor to a controller which has only the 6-pin display cable? Perhaps soldering a wire on the controller and connecting that to the sensor?
Elinx said:In settings the name for walkassist is 6km/h on offelfnino said:...... in the official VLCD5 manual I could not find any WALK ASSIST or CRUISE dedicated button.. so which button is it ?
stancecoke said:DavyWavy66 said:"loading file option_no_prot.ihx in option byte image in computer"
Ah, again an issue of my .gitignore settings. I just fixed it at github. Please download the repo again, it should work now!
https://github.com/stancecoke/TSDZ2-Smart-EBike/commit/9920098a4251dd72e4d271157c45909c5fe54be1
regards
stancecoke
You are welcome!revher said:I appreciate your new wiki and I started to install the softwares.
stancecoke said:You are welcome!revher said:I appreciate your new wiki and I started to install the softwares.
If you have any approvements for the wiki, just edit it. Anybody with a github account can write to the wiki.
regards
stancecoke
obcd said:The open source firmware uses "simplified FOC" to drive the motor. That should be more efficient than the standard firmware.
...
Sorry, I had to disable the restriction to collaborators, now is should work!revher said:I have a github account but I can't see the edit/newpage button on your wiki.
revher said:Thank you, this is exactly what somebody would like to read in Stancecoke's wiki (but I haven't found yet how to write in).
Yes your wiki can be edited now, as well as the main wiki too!stancecoke said:Sorry, I had to disable the restriction to collaborators, now is should work!revher said:I have a github account but I can't see the edit/newpage button on your wiki.
...
For details that are missing from your eyes, please create a new page.
...
regards
stancecoke
Thank you for the hint related to the error due to the unknown stm8-objcopy command. But on OS/X and using the SDCC version installed with homebrew (sdld Linker V03.00 + NoICE + sdld), the -i option (for Intel Hex as (out)file[.ihx]) has to be added, otherwise the main.ihx is not output.rob42 said:Thanks for that, I found another option too. In linux (ubuntu 18.04 with SDCC 3.8 I have some related commands
sdasstm8 - -plosgffw main //manipulates symbols etc
sdldstm8 -nf main.lk //linker
I found it all worked by just running `sdldstm8 -nf main.lk` in the src/controller dir after the make process errored. Gave me a main.ihx file which flashed and worked.
sdldstm8 -fi main.lkstancecoke said:You can find all the information in the wiki of the main project, see the link in the readme.md
https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki
I want to keep my wiki main page as simple and self explanatory as possible.
For details that are missing from your eyes, please create a new page.
Perhaps you can create one page for Linux users, we had questions about installing SDCC under Linux several times. I'm not familiar with Linux :wink:
regards
stancecoke
Have you read the wiki of the main project? You can find very much information there. Look at the links to bitbucket, too. You can find the original firmware files there also, so you can go back to the stock firmware any time.revher said:because I am still lost
revher said:I don't know how the file "option_no_prot.ihx" is produced
It's in the repo and there's no need to think about it.stm8flash -c stlinkv2 -p stm8s105?6 -s eeprom -w TSDZ_orig_eeprom.bin
Determine EEPROM area
Due to its file extension (or lack thereof), "TSDZ_orig_eeprom.bin" is considered as RAW BINARY format!
1024 bytes at 0x4000... Tries exceeded
make: *** [restoreeeprom] Error 255Just fork my repo, upload your changes and send a pull request!revher said:my scripts (compile_20.sh and edit_advanced.sh) and my java patch are still on my computer.