7lucky7 said:
...
I've got the 250w 36v motor version but have a few little questions..........
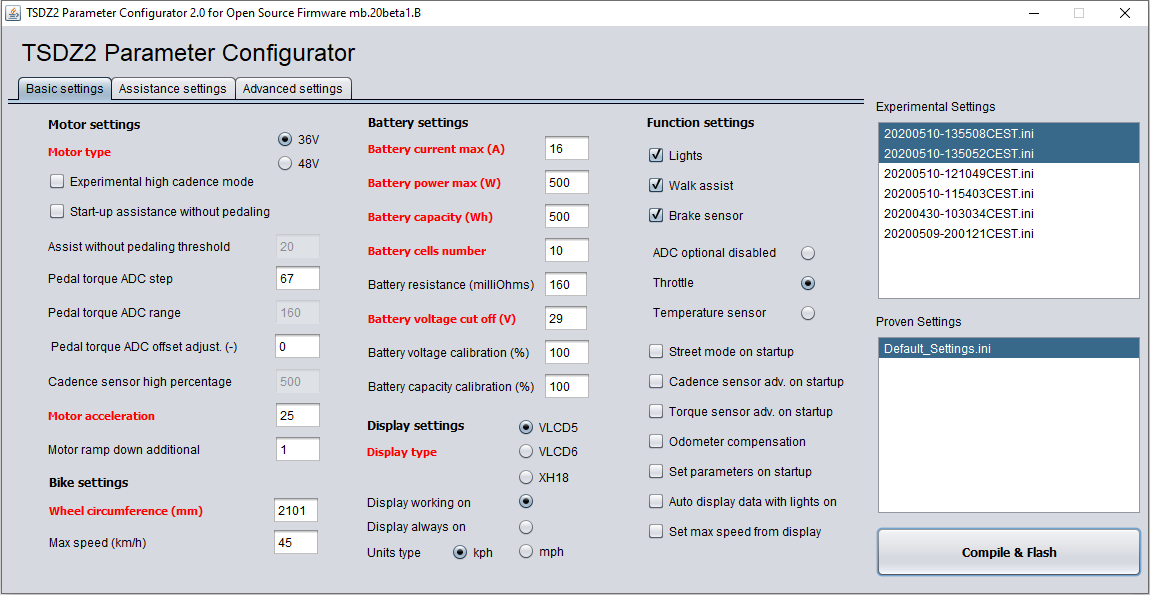
1. --This motor has a hardware limited current of 18A (750Wmax. full batterie), but a lower current is better for less heat.
You have setup 16A max. current, with lowest batterie Voltage of 30V, 30x16= 480W max.
250W is the nominal power for continuous use, but that is only a factory controller-setting with stock FW.
The motor is exactly the same as the 36V-350W tsdz2. Meaning 12A continous current is possible, but 10A is advisable.
So if you setup max. power to 480W, you will have the same power with full batterie with 42V (current 11,5A)
In that case you have always 480W max. with discharging of the batterie (42V>>30V)
Normally you don't need the max. power or only some short time.
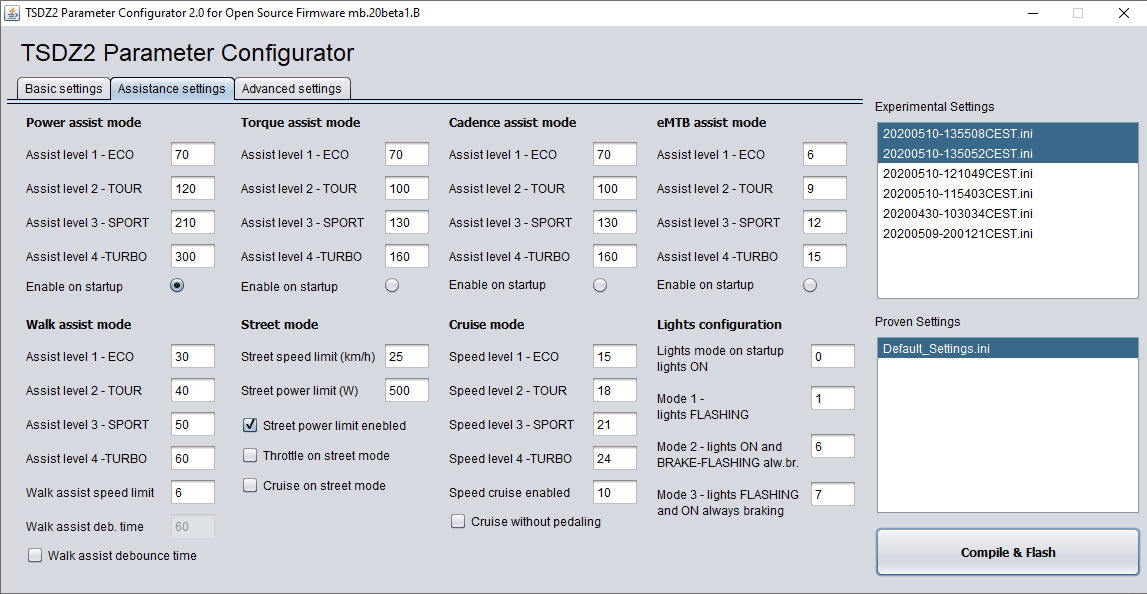
2. -- For powerassist keep in first place the default settings. They are tested and evaluated.
This are percentages of your own power. So 300 means 300% more power, but never more as the max power you have setup with 1.
Only if you can give less power yourself then experiment with a higher setting or if you find the assist too much, lower these values.
It also depends of the use of the bike (road, mtb or cargo).
3. -- You can't easy compare the OSF assist modes with factory settings, because the powercurve in every mode is another one.
The best what you can do is setup first the basic settings and try the bike first.
If you are satisfied your done, otherwise go experimenting with other settings.
Flashing is easy if you have setup your ST-link

")