
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Tsdz2 firmware open source adapted to vlcd5, vlcd6 and xh18
- Thread starter andrea_104kg
- Start date

Elinx said:1. --This motor has a hardware limited current of 18A (750Wmax. full batterie), but a lower current is better for less heat.7lucky7 said:...
I've got the 250w 36v motor version but have a few little questions..........
You have setup 16A max. current, with lowest batterie Voltage of 30V, 30x16= 480W max.
250W is the nominal power for continuous use, but that is only a factory controller-setting with stock FW.
The motor is exactly the same as the 36V-350W tsdz2. Meaning 12A continous current is possible, but 10A is advisable.
So if you setup max. power to 480W, you will have the same power with full batterie with 42V (current 11,5A)
In that case you have always 480W max. with discharging of the batterie (42V>>30V)
Normally you don't need the max. power or only some short time.
2. -- For powerassist keep in first place the default settings. They are tested and evaluated.
This are percentages of your own power. So 300 means 300% more power, but never more as the max power you have setup with 1.
Only if you can give less power yourself then experiment with a higher setting or if you find the assist too much, lower these values.
It also depends of the use of the bike (road, mtb or cargo).
3. -- You can't easy compare the OSF assist modes with factory settings, because the powercurve in every mode is another one.
The best what you can do is setup first the basic settings and try the bike first.
If you are satisfied your done, otherwise go experimenting with other settings.
Flashing is easy if you have setup your ST-link
Thanks so much for the detailed reply. Regarding point 1 what would be your recommended settings. Keeping 16a and upping max power to 480w??? (I did notice the peak power was less than factory setting with the 250w setting cycling this morning, though I usually ride on eco so only noticed with it turned up to turbo on a hill or when first pulling away)
The increased cadence support was really noticeable cycling this morning. Definitely a good upgrade!!
Thanks
Jim

Waynemarlow
10 kW
Guys,
I've been using my ST Link for programming the motor and LCD3 but now need to program a motor for a friend who has the VLCD5 display. His newish motor unit is misreading the voltage of his battery and won't respond until we drain his battery by 0.1 volt. Easiest way to rectify this is to go over to the V20 software.
But I'm having some problems with installing the ST software ( ST Visual Development ) directly to the C:/ directory. When you click on the sttoolset.pack42 downloaded file it gives no option other than to install it to its own directory within the Program directories. Any clues how to force the application to install the program directly to the C:/ directory.
Thanks
I've been using my ST Link for programming the motor and LCD3 but now need to program a motor for a friend who has the VLCD5 display. His newish motor unit is misreading the voltage of his battery and won't respond until we drain his battery by 0.1 volt. Easiest way to rectify this is to go over to the V20 software.
But I'm having some problems with installing the ST software ( ST Visual Development ) directly to the C:/ directory. When you click on the sttoolset.pack42 downloaded file it gives no option other than to install it to its own directory within the Program directories. Any clues how to force the application to install the program directly to the C:/ directory.
Thanks
As I said before. The character of the levels is of different orde than stock FW.7lucky7 said:.....
Thanks so much for the detailed reply. Regarding point 1 what would be your recommended settings. Keeping 16a and upping max power to 480w??? (I did notice the peak power was less than factory setting with the 250w setting cycling this morning, though I usually ride on eco so only noticed with it turned up to turbo on a hill or when first pulling away).......
....
The peak power climbs up slower for saving the blue gear.
I can imagine that you want to compare the different levels, but better is to find out which level your like the best.
Don't say "I usually ride eco" but try out all levels. After you feel the character of each level you can play with the values in the configurator. (On stock FW I always was cycling on level 3 and with OSF level 2 >> max.450W15A flat (dutch) road use max. 30kph).
It is no problem to go with a higher max. power level (say 630W 17A). Only minor point is that you will have that level only with a higher battery Voltage, so with a low battery you can't get that powerlevel anymore.
A second minor point could be the temperature of the motor. You can keep this controlled with a temperaturesensor (throttle is not possible anymore) and insert heat conductive siliconpads
Elinx said:As I said before. The character of the levels is of different orde than stock FW.7lucky7 said:.....
Thanks so much for the detailed reply. Regarding point 1 what would be your recommended settings. Keeping 16a and upping max power to 480w??? (I did notice the peak power was less than factory setting with the 250w setting cycling this morning, though I usually ride on eco so only noticed with it turned up to turbo on a hill or when first pulling away).......
....
The peak power climbs up slower for saving the blue gear.
I can imagine that you want to compare the different levels, but better is to find out which level your like the best.
Don't say "I usually ride eco" but try out all levels. After you feel the character of each level you can play with the values in the configurator. (On stock FW I always was cycling on level 3 and with OSF level 2 >> max.450W15A flat (dutch) road use max. 30kph).
It is no problem to go with a higher max. power level (say 630W 17A). Only minor point is that you will have that level only with a higher battery Voltage, so with a low battery you can't get that powerlevel anymore.
A second minor point could be the temperature of the motor. You can keep this controlled with a temperaturesensor (throttle is not possible anymore) and insert heat conductive siliconpads
Thanks I'll probably go with 15A 450w for my next flash and just see how it rides for 50 miles or so
Hi guys
Im waiting impatiently for my stlink-adapter, and try to read as much as possible to understand the OSF. One thing I dont really catch, is what exactly EMTB mode is. I understand the difference between power, torque and cadence mode, but I dont really see what the difference from EMTB and power mode is? The name of it sounds like something I want to have since Im using my motor on a FS MTB for singletrail riding, so I'm quite curious")
Oh, and are the maximum recomended values for motor acceleration somewhere close to the stock FW motor acceleration? I understand that low acceleration values helps keep the blue gear a better life, but I would rather keep the stock ratio and replace the gear from time to time than to make it slower.
thanks
Im waiting impatiently for my stlink-adapter, and try to read as much as possible to understand the OSF. One thing I dont really catch, is what exactly EMTB mode is. I understand the difference between power, torque and cadence mode, but I dont really see what the difference from EMTB and power mode is? The name of it sounds like something I want to have since Im using my motor on a FS MTB for singletrail riding, so I'm quite curious
Oh, and are the maximum recomended values for motor acceleration somewhere close to the stock FW motor acceleration? I understand that low acceleration values helps keep the blue gear a better life, but I would rather keep the stock ratio and replace the gear from time to time than to make it slower.
thanks
I never use it (cylcle only on roads), but it is a more dynamic mode with a wider range. This what the wiki writes about emtb.HrKlev said:... what exactly EMTB mode is. .....
...maximum recomended values for motor acceleration somewhere close to the stock FW motor acceleration? .....
Emtb "mode automatically adjusts motor torque depending on the torque applied on the pedals. More pedal torque equals a greater percentage of motor torque. Meaning that you can get everything from normal assistance all the way to absolute maximum power without changing assist levels."
It is possible to change the ramp value for faster acceleration. You found the adviced values already in the configuration manual.
If you want about the same as stock level you must try out different values.
But again OSF does work on a different way as stock FW so I'm not sure you got the same feeling.
I updated the firmware.
The management of the "Pedal torque adc range" and "Pedal torque adc offset adjusment" parameters has been improved.
These two parameters are not present in the 20beta1 version of buba.
- "Pedal torque adc range", added parameter to compensate for the difference between the torque sensors.
They are all different. I have seen torque sensors with a range of 80 and others of 200.
This parameter is used to amplify the working range of the torque sensor when it is too limited.
Impossible to compensate only by changing the value of the assistance levels.
A calibration and / or an optimization of the parameter with tests is required.
In "Torque assist" and "eMTB assist" there was no parameter for adjusting the adc values of the torque sensor to adjust the assistance.
Obviously it also affects "Power assist", but in this mode, if it did not affect the precision of human power, it was already possible to compensate for the difference in assistance with the "Pedal torque adc step" parameter (67).
- "Pedal torque adc offset adjusment", parameter added on specific request for handbike, increases the sensitivity of the pedals at the start.
It can also be used with normal bikes and "hard" torque sensors.
To be used very carefully, if you increase too much, the bike either starts alone or when you stop pedaling it does not stop. Recommended value from 0 to 10, max 20.
- I also added a note to the manuals regarding the change of torque sensor mode, from standard mode to advanced mode.
"Attention, this setting is to be done with the bike stationary without the feet on the pedals, otherwise the torque sensor calibration starts".
The management of the "Pedal torque adc range" and "Pedal torque adc offset adjusment" parameters has been improved.
These two parameters are not present in the 20beta1 version of buba.
- "Pedal torque adc range", added parameter to compensate for the difference between the torque sensors.
They are all different. I have seen torque sensors with a range of 80 and others of 200.
This parameter is used to amplify the working range of the torque sensor when it is too limited.
Impossible to compensate only by changing the value of the assistance levels.
A calibration and / or an optimization of the parameter with tests is required.
In "Torque assist" and "eMTB assist" there was no parameter for adjusting the adc values of the torque sensor to adjust the assistance.
Obviously it also affects "Power assist", but in this mode, if it did not affect the precision of human power, it was already possible to compensate for the difference in assistance with the "Pedal torque adc step" parameter (67).
- "Pedal torque adc offset adjusment", parameter added on specific request for handbike, increases the sensitivity of the pedals at the start.
It can also be used with normal bikes and "hard" torque sensors.
To be used very carefully, if you increase too much, the bike either starts alone or when you stop pedaling it does not stop. Recommended value from 0 to 10, max 20.
- I also added a note to the manuals regarding the change of torque sensor mode, from standard mode to advanced mode.
"Attention, this setting is to be done with the bike stationary without the feet on the pedals, otherwise the torque sensor calibration starts".
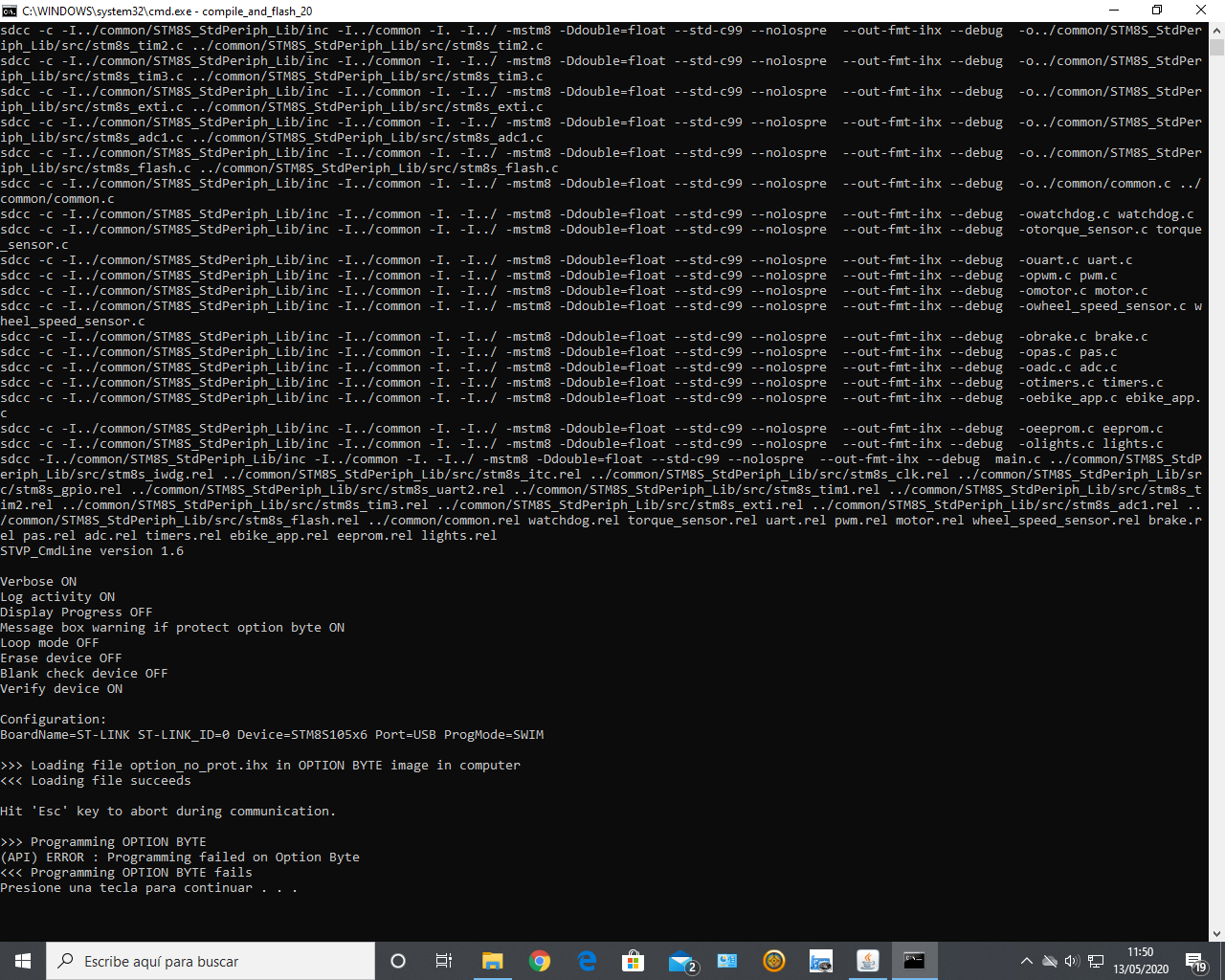
Hello, after multiple problems I managed to install the previous version of the mbrusa software, I was going to install the new version and I have a problem again ... does anyone know what could be the reason?
Right now the software has been deleted but the new one did not load so the e-bike does not work
https://ibb.co/n1XdHfd
Right now the software has been deleted but the new one did not load so the e-bike does not work
https://ibb.co/n1XdHfd
Try connecting ST-LINK
Open ST Visual programmer
Check Configure = ST-LINK, USB, SWIM, STM8S105x6
Select OPTION BYTE tab
Program -> Current Tab
If there are errors, you have installation or connection problems.
If instead there are no errors
Close ST Visual programmer
Open Java Configurator
Compile & Flash
Open ST Visual programmer
Check Configure = ST-LINK, USB, SWIM, STM8S105x6
Select OPTION BYTE tab
Program -> Current Tab
If there are errors, you have installation or connection problems.
If instead there are no errors
Close ST Visual programmer
Open Java Configurator
Compile & Flash
mbrusa said:Hi everyone
I decided to release the new version, I would have liked to try it a little more, okay, from Monday I can do it.
However, two months locked at home have served to fix many small details of the firmware (changelog.txt) and to complete the Java Parameter Configurator of Stancecoke that I thank.
I posted the new version on GitHub, I hope it all works.
https://github.com/emmebrusa/TSDZ2-Smart-EBike-1
Hello, this is my first post, first of all thank you all so much for the hard work, there are so many of us that benefit, but we have no way to provide much help, so thank you.
Ok, so my bike with TSDZ2 and VLCD6 is a more modern 29er hardtail with short chainstay and slack geometry, my use before the pandemic was for commuting to work, but for me bicycle commuting means having fun on the way to work, goofing off by jumping, having one wheel on the ground, finding new fun routes with ledges, jumps and dropoffs, etc. My other bike is a 20" bmx bike.
I do not have the wheel speed sensor attached because I don't care how fast I'm going, no lights, no throttle, don't care about walking assistance or any other 'feature'. The intent is for the motor to make it possible for me to: 1) not be too sweaty when I get to work, 2) do things at higher speed and with more range than I would if I used my bmx for example
As such, what I'm looking for is the feeling like my legs are just more powerful than they actually are. So, my ideal (I think) is that my torque input is scaled linearly to the torque output of the motor. Simple as that. I understand that some things need to be considered in the time domain, so that, for example, the motor response is not jerky or unpredictable relative to the torque input. But using my settings pictured with the previous firmware version (based on Ackamaniacs settings), the feeling of the bike I tried to depict with the graphs:
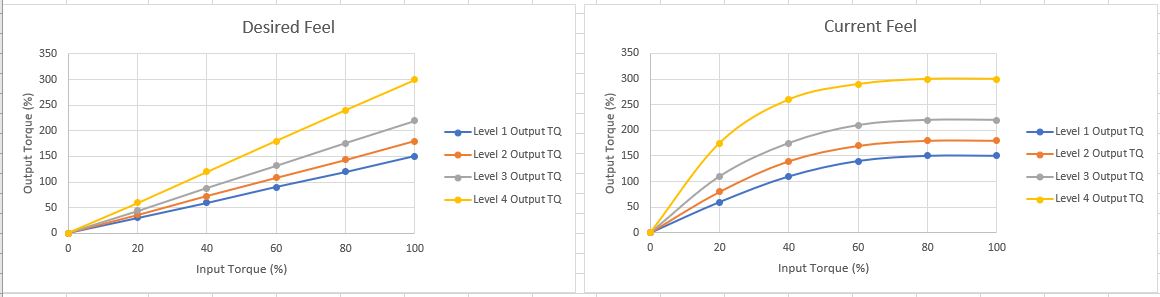
I would like to try this newer version with more advanced torque sensor related settings, as well as the torque sensor calibration which I have not done, but before I start can someone advise settings/parameters to pay particular attention to that would get me close to my desired goal?
For example, I do not feel comfortable AT ALL trying to wheelie the bike using the motor torque to assist getting the wheel up. There is a delay between my pedal input and motor output, then the motor output feels too strong relative to my light pedal effort or too weak relative to a heavy pedal effort, then the motor seems to continue it's output for a relatively long time after I stop the pedal effort, even though I've set PWM Duty Cycle Ramp DW so low.
Maybe I am asking too much for this system but I would like to get it as close as possible within the hardware and control limitiations to what I want. I appreciate any advice or suggestion, thank you.
Elinx said:I never use it (cylcle only on roads), but it is a more dynamic mode with a wider range. This what the wiki writes about emtb.HrKlev said:... what exactly EMTB mode is. .....
...maximum recomended values for motor acceleration somewhere close to the stock FW motor acceleration? .....
Emtb "mode automatically adjusts motor torque depending on the torque applied on the pedals. More pedal torque equals a greater percentage of motor torque. Meaning that you can get everything from normal assistance all the way to absolute maximum power without changing assist levels."
It is possible to change the ramp value for faster acceleration. You found the adviced values already in the configuration manual.
If you want about the same as stock level you must try out different values.
But again OSF does work on a different way as stock FW so I'm not sure you got the same feeling.
Thanks for the answers! I guess I will just have to test myself when the adapter arrives. Patience is not my friend
You have different needs that require different settings.GrpB said:I would like to try this newer version with more advanced torque sensor related settings, as well as the torque sensor calibration which I have not done, but before I start can someone advise settings/parameters to pay particular attention to that would get me close to my desired goal?
For example, I do not feel comfortable AT ALL trying to wheelie the bike using the motor torque to assist getting the wheel up. There is a delay between my pedal input and motor output, then the motor output feels too strong relative to my light pedal effort or too weak relative to a heavy pedal effort, then the motor seems to continue it's output for a relatively long time after I stop the pedal effort, even though I've set PWM Duty Cycle Ramp DW so low.
Maybe I am asking too much for this system but I would like to get it as close as possible within the hardware and control limitiations to what I want. I appreciate any advice or suggestion, thank you.
In my latest version, which is based on 20.beta.1, there are different riding modes, you have to choose the most suitable one.
To go to work "Power assist" is fine, when you want to have fun I think it is better to "Torque assist", it give assistance proportional to pushing on pedals. It is not as linear as you would like, but it can be an advantage not a defect, it is worth trying.
If you do not want to feel a delay between the pedal push and the motor start, you must enable "Start-up assist without pedaling" and gradually increase the value of "Assist without pedaling threshold" until you find the best setting.
Another possibility is to use "eMTB assist" with low sensitivity, from 1 to 6, the assistance is always proportional to pushing on pedals as "Torque assist", but with a different response curve.
Good fun.
w0utje
1 W
- Joined
- Jan 12, 2020
- Messages
- 51
With the custom firmware's its possible to use a 52v battery with a 48v motor? My battery's bms died, new one from ali's onroute but its going to take a while. Guy here in the same village sells a new unipack 52v-14Ah hailong case battery, thinking of picking that one up and using it till the other bms is back.
Got a streetbike and mtb fitted with a tsdz2 so 2 battery's is quitte handy to have.
Got a streetbike and mtb fitted with a tsdz2 so 2 battery's is quitte handy to have.
w0utje said:With the custom firmware's its possible to use a 52v battery with a 48v motor? My battery's bms died, new one from ali's onroute but its going to take a while. Guy here in the same village sells a new unipack 52v-14Ah hailong case battery, thinking of picking that one up and using it till the other bms is back.
Got a streetbike and mtb fitted with a tsdz2 so 2 battery's is quitte handy to have.
Yes. With mrbusa's firmware for standard displays you can setup the battery parameters for 52V battery in the configurator before flashing. 48V is close enough that it's possible to use both batteries with same parameters, although for 48V your cutoff voltage would be higher than usually to keep safe with 52V battery. With casainho's OSF for 850C/860C/SW102 displays you have the added benefit of being able to change the parameters straight from the display.
w0utje said:I read it's easier to damage the motor and controller with the 52v, if that's the case I'm not going to try it. I don't have temperature sensor installed.
You can limit the maximum current. Voltage in itself does not do anything that would damage the motor or controller. If the motor power (current x voltage) is too high for a long period of time, heating may cause damage. Voltage is only one factor in this equation and 4 volts difference usually does not make a significant change. But if you worry about it then just decrease the max current by an ampere or two.
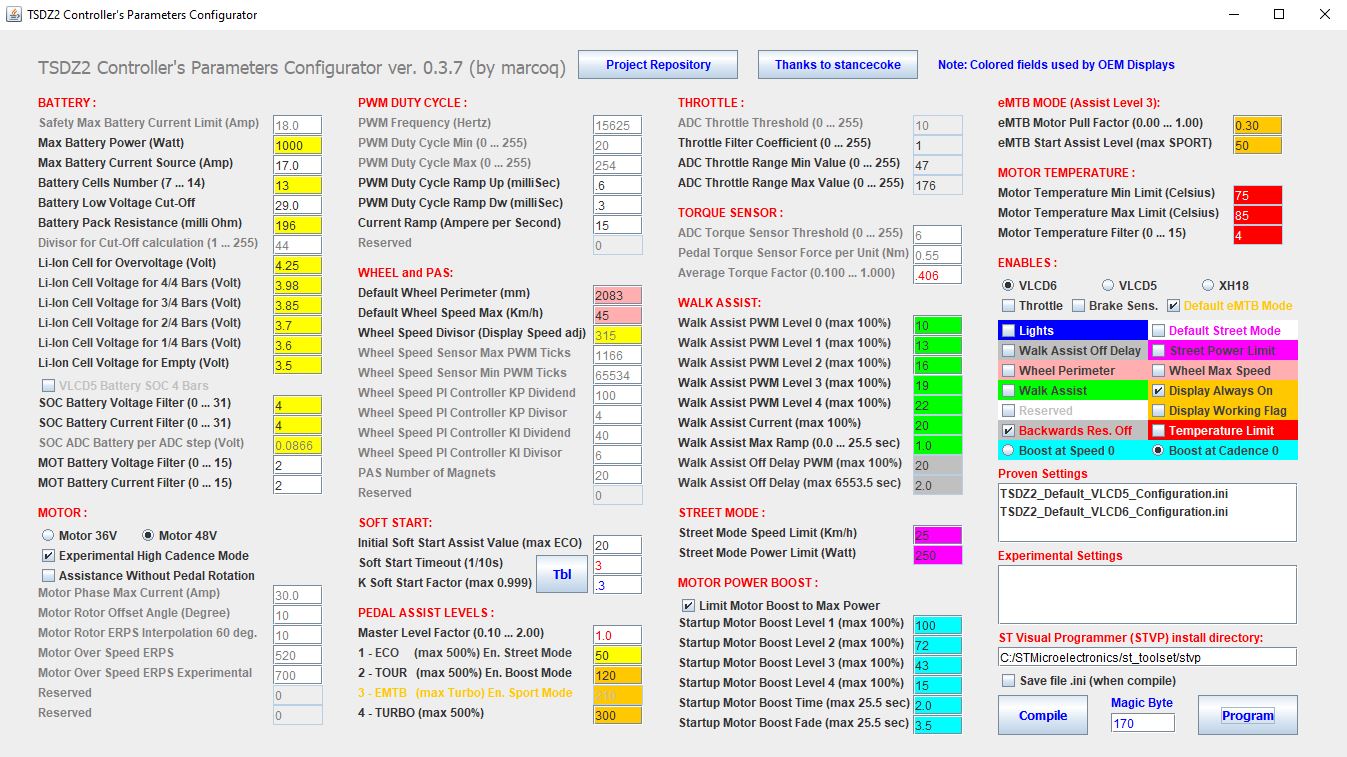
Hi all (thank to mbrusa and stancecoke...),
I am using the latest version with the settings described on the scan of my screen. It is a new bike with a Trio German mid-motor which in fact is a TSDZ2. Everything worked fine with a backup of the original ".bin" files in case of a failure. Then flashing without errors. I already flashed a Stancecoke configuration on an old bike with success (I am also the author of the Wiki concerning the Unix and OS/X installation). As my older bike had a hub dynamo, I never tested the lights generated by the motor.
And this new installation (the mbrusa) on a new bike is the occasion to test the lights. And unfortunately when a switch the lights on (on a XH18), the lights go on but with a permanent Er 02 and the speed goes to 99.9 km/h for a few seconds and back to a steady 36km/h and still the error. Please could you tell me what I did wrong in the settings below ? Regards (meanwhile if you have time to make the wiki open again I will update the page).
I am using the latest version with the settings described on the scan of my screen. It is a new bike with a Trio German mid-motor which in fact is a TSDZ2. Everything worked fine with a backup of the original ".bin" files in case of a failure. Then flashing without errors. I already flashed a Stancecoke configuration on an old bike with success (I am also the author of the Wiki concerning the Unix and OS/X installation). As my older bike had a hub dynamo, I never tested the lights generated by the motor.
And this new installation (the mbrusa) on a new bike is the occasion to test the lights. And unfortunately when a switch the lights on (on a XH18), the lights go on but with a permanent Er 02 and the speed goes to 99.9 km/h for a few seconds and back to a steady 36km/h and still the error. Please could you tell me what I did wrong in the settings below ? Regards (meanwhile if you have time to make the wiki open again I will update the page).
Hi revher
When the lights come on, there is an automatic display of the data in sequence. Read in the additional manual.
99.9 is the percentage of the battery, then the voltage is displayed.
If you don't want to see this data with the lights on, disable "Auto display data with lights on".
E02 is always displayed when the lights come on for 5 seconds.
Regards
When the lights come on, there is an automatic display of the data in sequence. Read in the additional manual.
99.9 is the percentage of the battery, then the voltage is displayed.
If you don't want to see this data with the lights on, disable "Auto display data with lights on".
E02 is always displayed when the lights come on for 5 seconds.
Regards
Hi revher
When it turns on the first time after flashing, the % battery is always set to 99.9, I had to put a default value on startup for a problem with VLCD6.
The following times it is set to 99.9 only if the voltage of the individual cells is higher than the "Reset SOC percentage" value.
I make a copy / paste from the manual:
"- modified the manual reset of the residual battery percentage.
As in the previous version, manual reset of the residual battery percentage is possible.
Select the 4-TURBO level and press the light button 2 times within 5 seconds of power on.
Now the fixed value of 99.9% is no longer set, but at a percentage value proportional to the bars (4 or 6).
Useful when putting a battery that is not fully charged or the first time it is turned on after flashing.
Keep in mind that now, at the first start after having flashing the program, the percentage is always set at 99.9%, regardless of the battery charge, therefore manual reset is recommended."
Regards
When it turns on the first time after flashing, the % battery is always set to 99.9, I had to put a default value on startup for a problem with VLCD6.
The following times it is set to 99.9 only if the voltage of the individual cells is higher than the "Reset SOC percentage" value.
I make a copy / paste from the manual:
"- modified the manual reset of the residual battery percentage.
As in the previous version, manual reset of the residual battery percentage is possible.
Select the 4-TURBO level and press the light button 2 times within 5 seconds of power on.
Now the fixed value of 99.9% is no longer set, but at a percentage value proportional to the bars (4 or 6).
Useful when putting a battery that is not fully charged or the first time it is turned on after flashing.
Keep in mind that now, at the first start after having flashing the program, the percentage is always set at 99.9%, regardless of the battery charge, therefore manual reset is recommended."
Regards
jeff.page.rides
100 W
- Joined
- Aug 13, 2019
- Messages
- 295
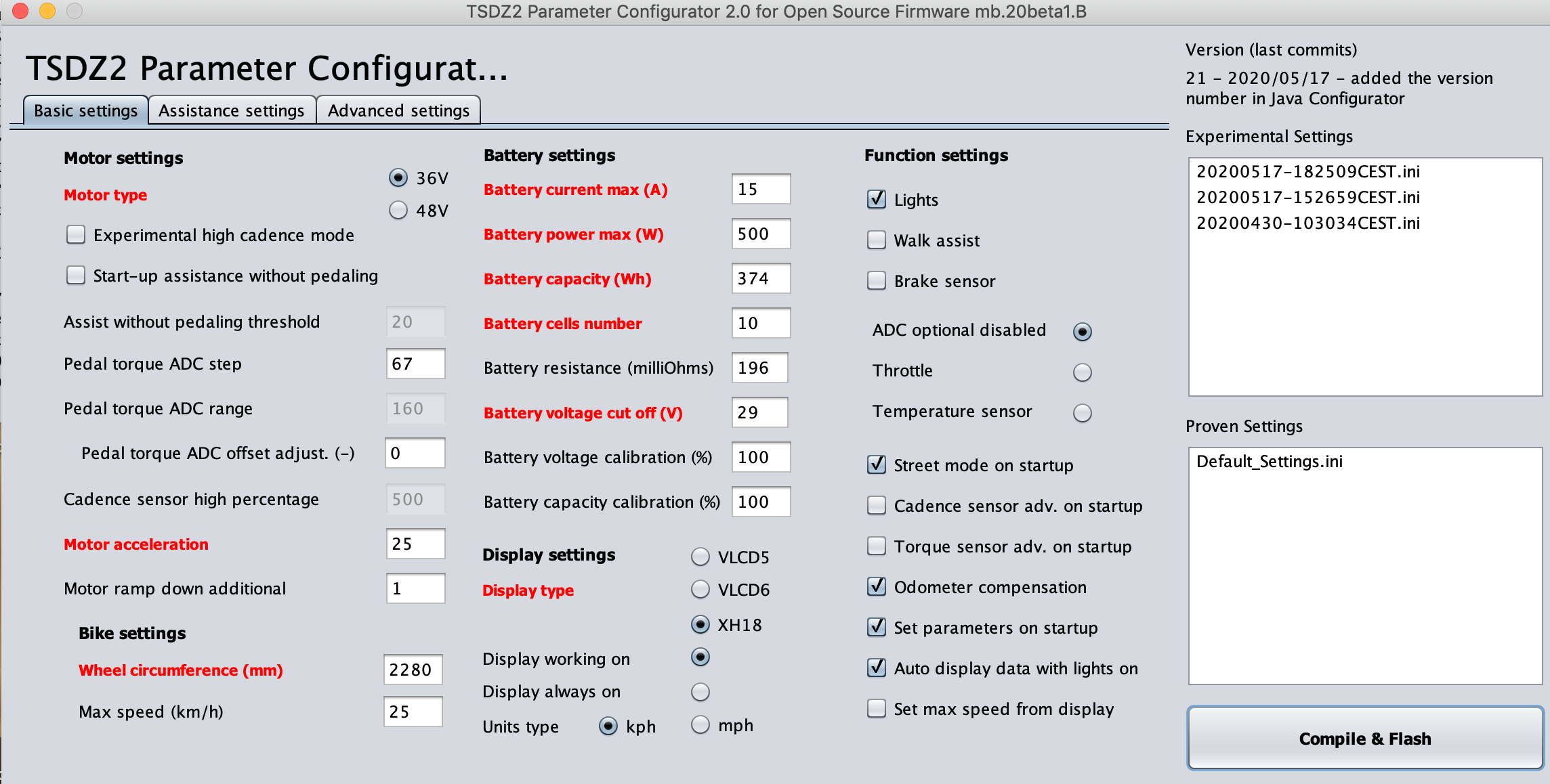
TSDZ2 Parameter Configurator 2.0 OSF mb.20beta1.B
Where do I find this so I can fill in all the boxes the way I want and then have someone flash it for me?
Is there anything else that needs to be filled out so that when I go to get it flashed it's all ready to go?
THANKS
Where do I find this so I can fill in all the boxes the way I want and then have someone flash it for me?
Is there anything else that needs to be filled out so that when I go to get it flashed it's all ready to go?
THANKS
I think you mean the configuration manual for the Java configurator.jeff.page.rides said:TSDZ2 Parameter Configurator 2.0 OSF mb.20beta1.B
Where do I find this .....
You find the manuals on mbrusa's github repo, together with the OSF and the configurator.
There are three manuals, in two languages (EN-IT), for mb.20beta1.B
1. Configuration manual
2. Display Operation manual
3. Additional Operation manual
For understanding the different parameters of the Java configurator, you need the configuration manual.
If you setup all the tabs of the configurator and enter "compile and flash", there will be saved an xxx.ini file with your preffered settings inside the directory "experimental settings" If you want you can rename this ini file for better recognizability.
jeff.page.rides
100 W
- Joined
- Aug 13, 2019
- Messages
- 295
Elinx said:I think you mean the configuration manual for the Java configurator.jeff.page.rides said:TSDZ2 Parameter Configurator 2.0 OSF mb.20beta1.B
Where do I find this .....
You find the manuals on mbrusa's github repo, together with the OSF and the configurator.
There are three manuals, in two languages (EN-IT), for mb.20beta1.B
1. Configuration manual
2. Display Operation manual
3. Additional Operation manual
For understanding the different parameters of the Java configurator, you need the configuration manual.
If you setup all the tabs of the configurator and enter "compile and flash", there will be saved an xxx.ini file with your preffered settings inside the directory "experimental settings" If you want you can rename this ini file for better recognizability.
THANKS, I WILL TRY LATER THIS WEEK.
Similar threads
- Replies
- 2,434
- Views
- 207,317
- Replies
- 197
- Views
- 33,674