Hi, I am sinning by double posting, the SW102 thread looks like it has been idle for a couple of weeks and I am suoer keen to crack on!
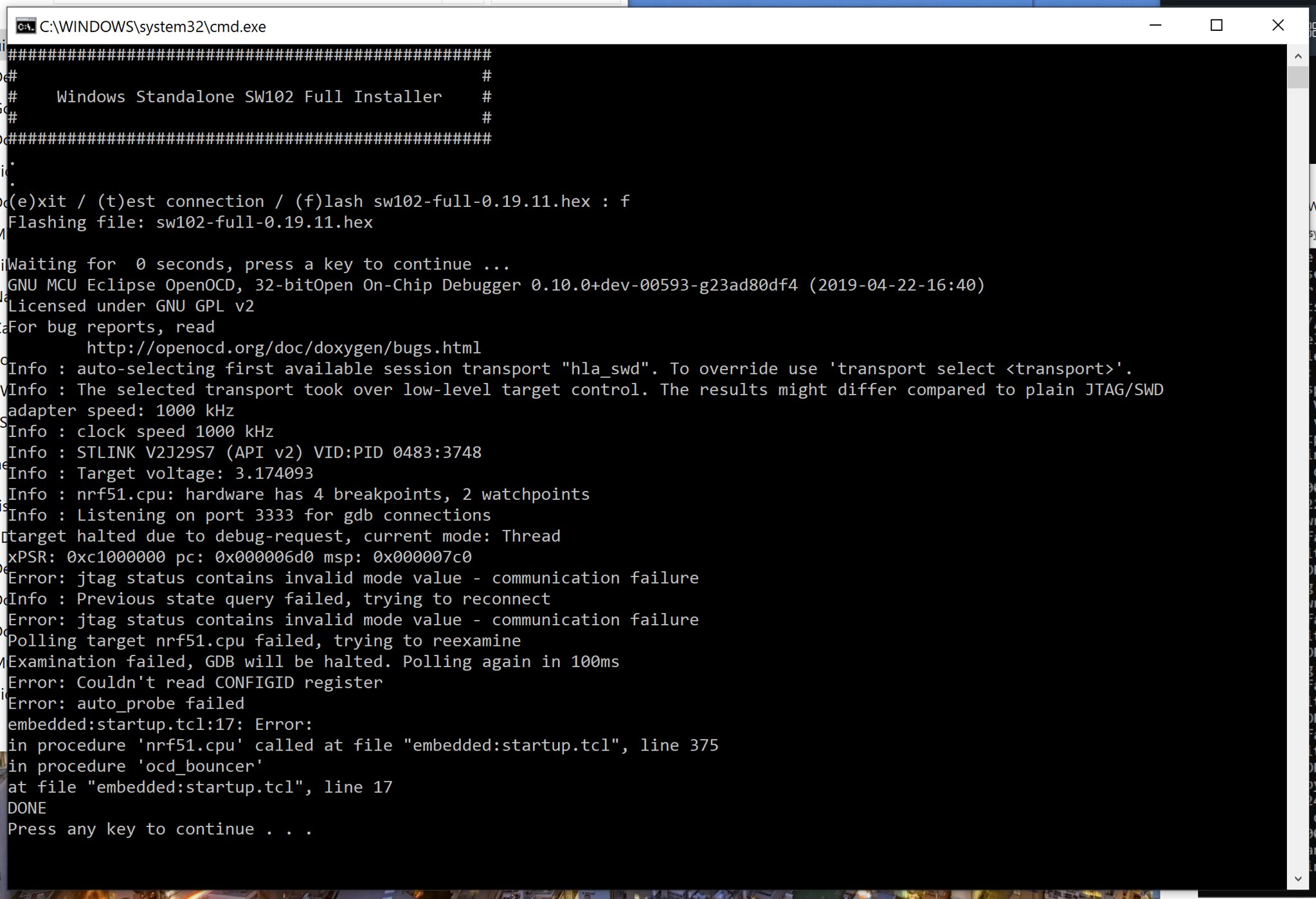
Any idea what i might be doing wrong?
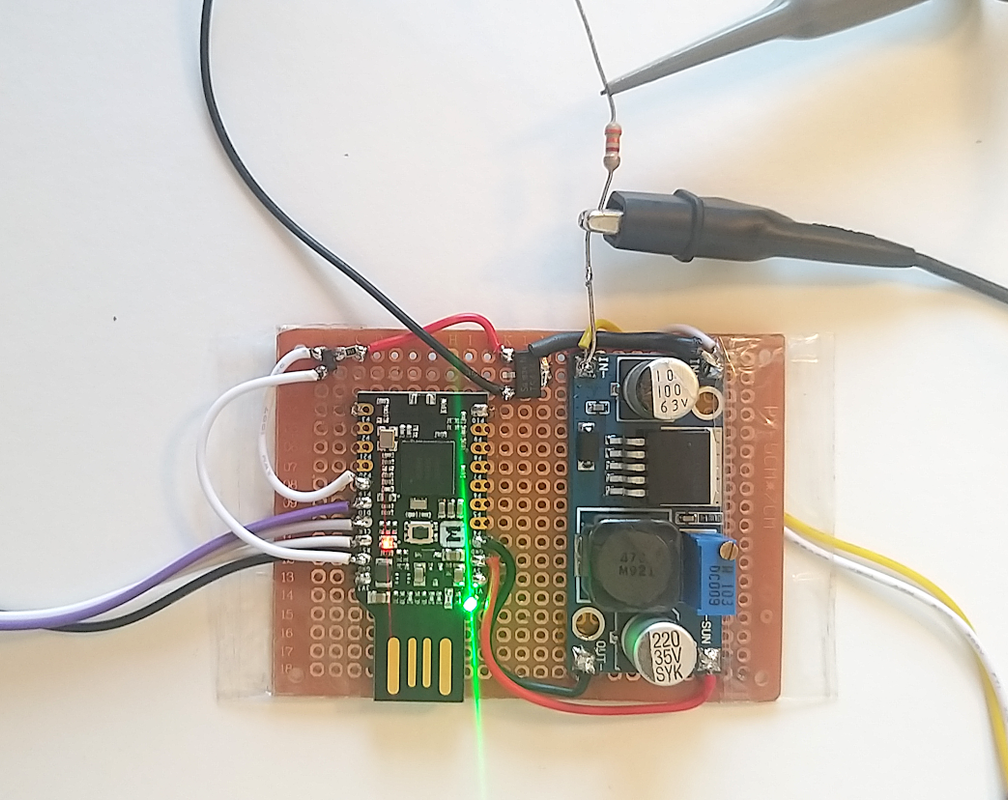
Wires are soldered through the side entry method and connected as illustrated in the wiki, unit is powered when attempting to flash.
The display is receiving power from the TSDZ2 which has already been flashed with firmware version 1 beta 4.
Other info that may be of use:
A couple of seconds after powering up the display it shows error 30 then displays the speed, allows you to access menu's etc, the battery icon is flashing empty even though the battery is charged.
I cannot detect a bluetooth signal from the unit on the phone app either, it is picking up other bluetooth devices nearby so the phone seems to be functioning O.K.
I did read some of the technical discussions about units shipping with and without bluetooth enabled but it quickly got too technical for me!
Thank you, and thanks for everyone's hard work that is contributing to this. I blew up my 860C before I got it working with the motor so keen to get it right second time! :lol: