I know this is already an older topic but i have the same noise problem with my controller and have done experimenting with it which might benefit others as well. And via google you will land in this topic sooner or later when finding a solution to the noise problem

So did i, and at first i thought i found the answer in this topic by just replacing a resistor and capacitor. Until i saw that my controller was a bit different. I have the YK43C and that one doesn't have the LM339N.
Until now i still don't know which chip is in the YK43C because they removed the numbers on the chip. But what i know is:
- that it has 18 pins
- has an 4 MHZ crystal
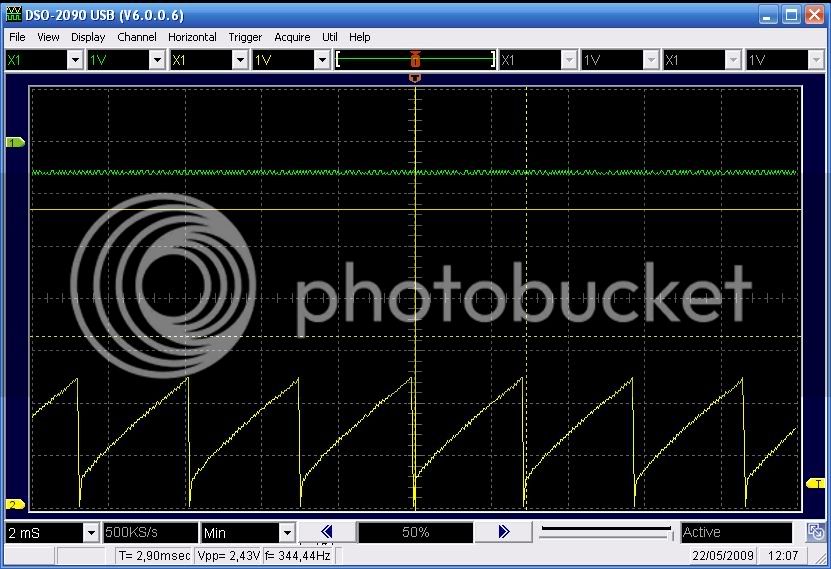
- PWM freq. is 100HZ
- PWM output is pin 9
- PWM signal is approx. 5 Volt
- Transistors are used with the 5 V PWM signal to drive the Mosfet Gates at 10Volt
- No Mosfet driver is used
Because i had no idea what chip was used i wasn't able to change the 100HZ PWM frequency to a higher freq. to reduce the noise.
What i knew was that the PWM output was on pin 9 and that this one was driving the transistors via a resistor. So there i came to the idea of disconnecting the onboard PWM signal from the unknown chip and replace it with my own signal. I took a two wire cable and connected one wires to the resistor (PWM) and the other one to ground.
What i did was de-soldering the resistor and connect a PWM signal which i took from an Arduino MEGA. (White wire in the picture)
With some heat-shrink tubing and hot glue i fixed it to the board.
The Ground connection (blue wire) was easy. Beside the original black GND wire there are two holes in the board which can be used to make a ground connection.
Route the cable outside the housing through the rubber cable entry and reassemble everything.
The next thing to do is to add a pull-down resistor to make sure the Mosfet is driven to a low state if there is no signal present. The easiest way is to connect a resistor between both wires. I used a 1.5K resistor but i think everything between 1K and 10K will do the job.
The first test i did was with a 500Hz PWM frequency. This worked but still gave a lot of noise.
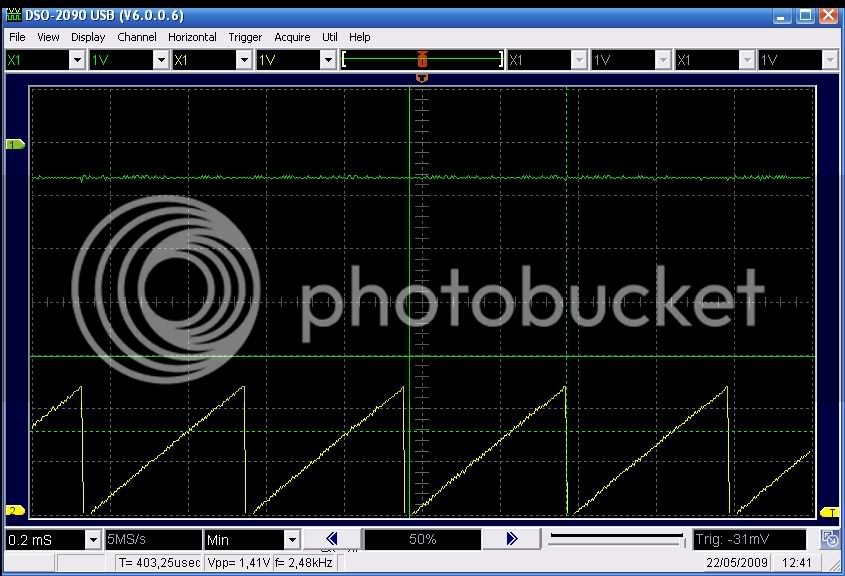
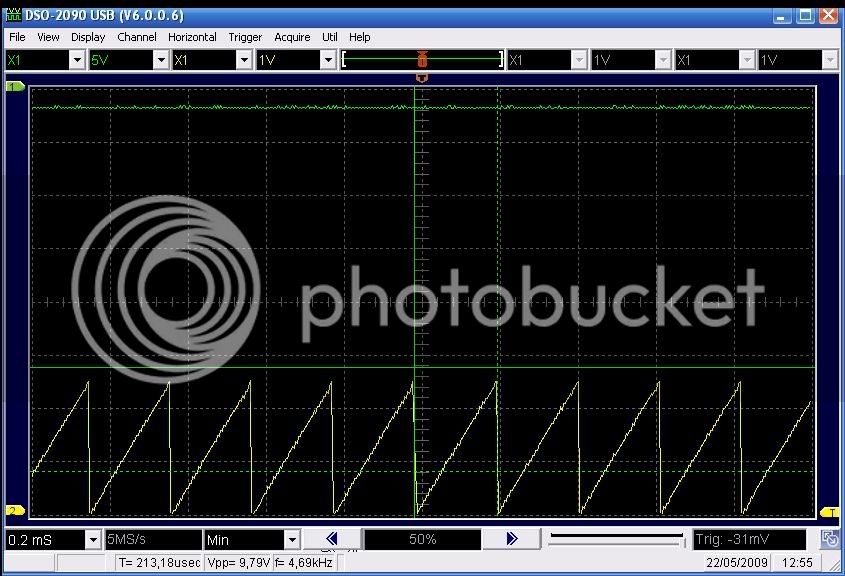
Then i changed the Arduino's frequency to 4KHz. This reduced the noise significantly. There was still a noise but it didn't sounded like a fighter jet taking off anymore. It was an acceptable noise now.
I also tried with a frequency of 7KHZ but this is to much. The controller gets hiccups with that frequency so i took it back to 4KHz. I have only driven it for a short period yet. This week i will get my Arduino wired up in a more definite and reliable way so i can make a longer trip.
I will post my findings here.