Update:
Took the bike out for a quick shake down with the upgraded mechanicals, and 5s battery. Seems good so far.
The new throttle buttons works a treat. The location is great, could even change gears while holding the throttle button in.
5s battery is definitely more gentle on the motor, I will stick with it.
Cycle analyst is now hooked up. Here are the stats from some quick stop/start runs around the block, going up and down hills, and a flat speed run.
Max Speed: 49.2 kph
Avg Speed: 26.0 kph
Time: 8 mins
Watt-hrs: 22.8
Wh/km: 7.3
Motor pickup on the tyre was very good. Still need to tweak it, as managed to get it to slip.
No sync issues.
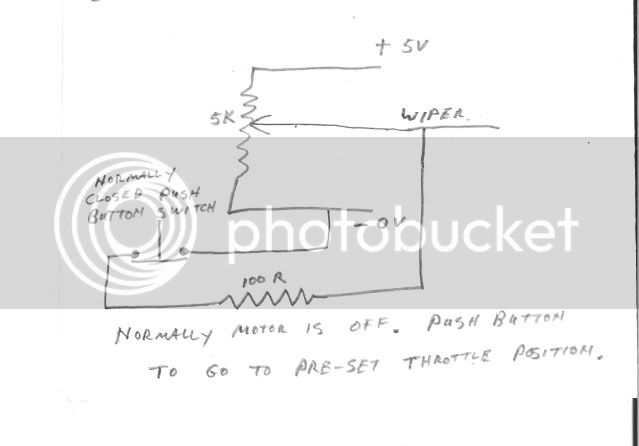
Biggest issue I have is the throttle. For a few reasons:
1) Button throttle is annoying when you don't want to use full power.
Let me explain. If I am not wanting to blast around at 1500+ watts all the time I might set the pot throttle at say 60%, so I have maybe 800-1000w.
This is great, helps me up the hills, nice lazy cruise on the flat. But then I start going down a hill, suddenly I start actually peddling quicker than the motor is set for. Then the motor lifts away from the tyre and is just spinning in free air. Then I start slowing down on the next flat, or up hill.
Now unless the drive is set such that it is always dragging on the tyre, it will not engage again, unless I let off the throttle and hit it again. Not exactly intuative for the user.
Solution 1a: variable trigger/thumb/twist throttle
Solution 1b: current limiting controller, so I can drop the power but not the top speed
Solution 1c: get the CA to limit current. But response will probably be too slow
2) Button throttle is annoying when you first engage it
Okay now I think well I'll just turn the power up. But these little motor/ESC combos spin up pretty darn quick and have a lot of power, so the pick up is pretty savage. Even when I have the ESC set to the softest start.
Solution 2a: somehow get a slower throttle ramp up, in the ESC, or a uC taking control of the throttle signal.
Solution 2b: some sort of spring/dampener like kepler to soften the engage
Solution 2c: tweak the geometry to use the tyre in similar manner to soften the engage
Solution 2d: have a soft dead stop, rather than hard and leave it at that.
At the moment I am leaning towards trying to get a variable throttle working somehow. So I would welcome any thoughts on how to achieve this on road bike handle bars. Extra points for links to suitable parts, and sketches. And I'll buy you a beer if I end up using it.
3) Slip
Well not exactly button throttle related, but if the drive does slip it is not obvious to the user. The problem with this is, to make the drive system as efficient as possible you actually want to have just enough contact force to avoid slip. As anymore is just deflecting the tyre, and the motor is just wasting power deflecting the tyre. But you don't always have control over the co-efficient of friction. So if it rains you actually want more contact pressure to overcome the lower friction coefficient, and still be able to lay down the power. It can also start to slip if you bounce over bumps, and the motor lifts of the tyre a bit.
Solution 3a: dry & wet setting for the drive engagement. This could be a simple adjustment of the dead-stop that sets the maximum tyre engagement
Solution 3b: traction control. Have a uC monitoring motor, and tyre speeds, and it can actually cut the power if the motor starts spinning quicker than the tyre.
Solution 3c: fix up the grip tape (that has ripped holes from hitting the seat tube before I fixed the dead-stops) so it doesn't slip
Finally on a more positive note to keep me motivated.
4) Weight
This bike is so light it is amazing. Riding it without power feels just the same as without the Commuter Booster on.
One of the things I have found annoying with my dual suspension ebike is it weighs 30kgs, and is a real pain to move around unless I am riding it. Like I had to go rescue my wife when her car broke down, and it is not the sort of bike I can quickly throw in the back of the car, or on roof mounted bike racks, even the tow ball mounted bike rack I have I feel reluctant to put it on since it weighs so much. Where as my road bike + commuter booster weighs 12 kgs. So easy to put on a roof rack, dismantle and put in the back of the car, or on a standard bike rack on the back. It is still a bike with all the light weight, easy to ride, easy to throw around, easy to transport, easy to store advantages, but also the awesome advantages of an 1000+ watt ebike.
I have got to fine tune this thing and overcome these little annoyances so I can realise all the awesome potential of a 12-13kg 1000+ watt 50kph 50km+ ebike.
- Adrian