
Good point. I don't have to use aluminium. The case could even be CFC, as most of the heat will be lost through convection (hopefully).fechter said:Using stainless steel or titanium instead of aluminum makes a huge difference too.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Dual rotor axial flux motor design
- Thread starter Miles
- Start date
rhitee05
10 kW
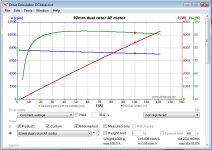
Overnight results - 6mm wide x 28mm long cores, 2x3t coils, stainless (air) pins, 0.75mm airgap, N48 magnets of varying thickness.
View attachment 3

View attachment 1

There doesn't seem to be very much gain past the 3 mm thick magnets. Some increase in the peak torque, but the Kv/Kt are very similar and the current required to reach 4 N-m only drops from 75 A to about 70 A. Based on this, it looks like 2-3 mm thick is probably the sweet spot given the tradeoff vs. back iron thickness. I just started another set to look at the 3 mm thick magnets vs several back iron thicknesses. Later I want to drop the core width back to 5 mm and try some permutations. I made a few more tweaks to my code to make it a little more efficient, hopefully I'll be down in the 4-5 hour range to process a single model case for a range of currents.
View attachment 3
View attachment 1
There doesn't seem to be very much gain past the 3 mm thick magnets. Some increase in the peak torque, but the Kv/Kt are very similar and the current required to reach 4 N-m only drops from 75 A to about 70 A. Based on this, it looks like 2-3 mm thick is probably the sweet spot given the tradeoff vs. back iron thickness. I just started another set to look at the 3 mm thick magnets vs several back iron thicknesses. Later I want to drop the core width back to 5 mm and try some permutations. I made a few more tweaks to my code to make it a little more efficient, hopefully I'll be down in the 4-5 hour range to process a single model case for a range of currents.
Thanks Eric. We're homing in 
Regarding the copper losses, I've been playing with the calculator on this site:
http://circuitcalculator.com/wordpress/2006/01/31/pcb-trace-width-calculator/
I like the way it sets a cookie to remember your settings/values.
Length of 2 phases, for 6mm wide cores with 2 x 3 turns is approx. 4 metres.
Wire section: 0.5mm x 10mm (for 28mm core height).
See also:
http://circuitcalculator.com/wordpress/2006/01/24/trace-resistance-calculator
Regarding the copper losses, I've been playing with the calculator on this site:
http://circuitcalculator.com/wordpress/2006/01/31/pcb-trace-width-calculator/
I like the way it sets a cookie to remember your settings/values.
Length of 2 phases, for 6mm wide cores with 2 x 3 turns is approx. 4 metres.
Wire section: 0.5mm x 10mm (for 28mm core height).
See also:
http://circuitcalculator.com/wordpress/2006/01/24/trace-resistance-calculator
kenkad
100 W
Regarding the recent torque constant vs phase current plots (model5d), I keep wondering 'if the torque constant is higher at lower phase currents', why are motors not designed so they have a multiple of 3-phase groups so that each 3-phase coil set is operating in the max range of 15-20 amps? Certainly, it seems that six 3-phase groups at 15 amps (90 amp equivalent) is much greater torque that one 3-phase group operating at 90 amps (seems like about 6 Nm vs 4.9 Nm on the last graph). Would this not also mean less concern about coil saturation, etc. Can someone provide an explaination? I cannot imagine more electronic losses with six 3-phase group of drivers. Just trying to understand what the simulation is showing.
kenkad
kenkad
I'm not sure it will make any difference, Ken. The fact that you're dividing the work between 3 controllers won't make any fundamental difference to the motor. The only advantage that I can see in this is for the controllers.kenkad said:I keep wondering 'if the torque constant is higher at lower phase currents', why are motors not designed so they have a multiple of 3-phase groups so that each 3-phase coil set is operating in the max range of 15-20 amps?
rhitee05
10 kW
kenkad said:Regarding the recent torque constant vs phase current plots (model5d), I keep wondering 'if the torque constant is higher at lower phase currents', why are motors not designed so they have a multiple of 3-phase groups so that each 3-phase coil set is operating in the max range of 15-20 amps? Certainly, it seems that six 3-phase groups at 15 amps (90 amp equivalent) is much greater torque that one 3-phase group operating at 90 amps (seems like about 6 Nm vs 4.9 Nm on the last graph). Would this not also mean less concern about coil saturation, etc. Can someone provide an explaination? I cannot imagine more electronic losses with six 3-phase group of drivers. Just trying to understand what the simulation is showing.
It's a function of saturation in the stator iron. As the current gets higher, it begins to require larger and larger incremental changes in current to get a certain incremental change in the B field, due to the non-linear magnetic properties, which in turn means larger incremental changes in current to get a certain incremental change in torque. Thus, the torque constant tends to drop off.
If you want to avoid that effect, as you say, just operate the motor at a lower current. But that means you'll have a much larger and heavier motor for a given power output. Picture an X5 limited to 500 W output. It doesn't matter how you have the coils configured, the more torque you want out of the motor the further into saturation you'll need to operate it.
How is it possible for the Agni motor to have a completely linear torque/current relationship in it's full published current range?
http://agnimotors.com/95_Series_Performance_Graphs.pdf
Look at figures 2a/2b to get a picture of the copper/iron ratio. Is it enough iron to not even reach the start of saturation @ 400A?
http://www.google.com/patents/US20020163258
http://agnimotors.com/95_Series_Performance_Graphs.pdf
Look at figures 2a/2b to get a picture of the copper/iron ratio. Is it enough iron to not even reach the start of saturation @ 400A?
http://www.google.com/patents/US20020163258
rhitee05
10 kW
I'm not familiar enough with the Agni motors to speculate. It's possible they do have enough iron to avoid saturating.
bearing said:How is it possible for the Agni motor to have a completely linear torque/current relationship in it's full published current range?
http://agnimotors.com/95_Series_Performance_Graphs.pdf
Look at figures 2a/2b to get a picture of the copper/iron ratio. Is it enough iron to not even reach the start of saturation @ 400A?
http://www.google.com/patents/US20020163258
It's a brushed design, and each 'coil' has like one turn.
rhitee05
10 kW
I'm headed out of town for a few days, so posting will be sporadic or nonexistent until Monday. However, before leaving I set up my computer to run a series of model permutations across what seems to be the most promising range of parameters. I'm checking 4/5/6 mm core widths, 2, 2.5, and 3 mm magnet thicknesses, and 24/26/28 mm core lengths (varying back iron thickness to maintain 41.5 mm overall length). That's a total of 27 permutations, which should give us a fair idea of the tradeoff space when I get back and crunch the data.
Is it possible to make brushless version with the same properties?fechter said:It's a brushed design, and each 'coil' has like one turn.
markobetti
10 kW
- Joined
- Jul 16, 2009
- Messages
- 620
efficiency would fall
bearing said:Is it possible to make brushless version with the same properties?fechter said:It's a brushed design, and each 'coil' has like one turn.
Yes, it is possible. The eCycle solid slot motor is an example. Each 'coil' is a single turn of solid copper bar.
The Remy HVH is another example. The datasheet is here:
http://www.remyinc.com/docs/Remy_HVH_250_Sep09.pdf

Interesting motors. But I still don't get why the "kt" is constant in the Agni, and has a significant slope in other motors. The Agni and the motors above has a special layout of the windings, but how the windings are layed out shouldn't have anything to do with saturation of iron. Using a solid conductor or 100 parallel insulated wires only affects fill factor.
fechter said:bearing said:Is it possible to make brushless version with the same properties?fechter said:It's a brushed design, and each 'coil' has like one turn.
Yes, it is possible. The eCycle solid slot motor is an example. Each 'coil' is a single turn of solid copper bar.
The Remy HVH is another example. The datasheet is here:
http://www.remyinc.com/docs/Remy_HVH_250_Sep09.pdf
rhitee05
10 kW
Miles said:Anyone an IEEE subscriber?
http://ieeexplore.ieee.org/Xplore/login.jsp?url=http%3A%2F%2Fieeexplore.ieee.org%2Fiel4%2F5899%2F15803%2F00732255.pdf%3Farnumber%3D732255&authDecision=-203
Yes. That paper and it's references look like interesting reading.
bearing said:Interesting motors. But I still don't get why the "kt" is constant in the Agni, and has a significant slope in other motors. The Agni and the motors above has a special layout of the windings, but how the windings are layed out shouldn't have anything to do with saturation of iron. Using a solid conductor or 100 parallel insulated wires only affects fill factor.
The flux in the iron is going to be a function of the amps x number of turns. If the number of turns is 1, it takes a lot of amps to saturate. The Agni also does not have 'teeth' on the iron that are more prone to saturation.
fechter said:The flux in the iron is going to be a function of the amps x number of turns. If the number of turns is 1, it takes a lot of amps to saturate. The Agni also does not have 'teeth' on the iron that are more prone to saturation.
Makes perfect sense. I guess what I'm wondering is: what's the drawback? why isn't everyone making motors which doesn't saturate?
bearing said:fechter said:The flux in the iron is going to be a function of the amps x number of turns. If the number of turns is 1, it takes a lot of amps to saturate. The Agni also does not have 'teeth' on the iron that are more prone to saturation.
Makes perfect sense. I guess what I'm wondering is: what's the drawback? why isn't everyone making motors which doesn't saturate?
The drawback is you don't get much BEMF from one turn, so you need a lot of poles to make up for it. In smaller sizes this would become a challenge to get enough poles and still have a reasonable size for the iron pieces.
How about the following idea for connecting up the coils?
- Before assembly, crimp the ends of each coil strip around a gold-plated tube (bullet connector?).
- Use gold-plated copper wire to form the bridging links.
- Wire is a push fit into the ID of the tube (end could be tapered).
- Before assembly, crimp the ends of each coil strip around a gold-plated tube (bullet connector?).
- Use gold-plated copper wire to form the bridging links.
- Wire is a push fit into the ID of the tube (end could be tapered).
Similar threads
- Replies
- 26
- Views
- 6,126
- Replies
- 1
- Views
- 2,393
- Replies
- 25
- Views
- 3,584
- Replies
- 479
- Views
- 47,934