So I got the procedure worked out for how to
reliably connect an LM35 temp sensor to the new CA.
As a bit of background, the reason I'm using this device is simple- it's what came with the MAC motor that I bought from Cell_Man. If you're doing this from scratch, then by all means use an LM335 or a 10k NTC thermistor. But for those not in control of what sensor is in your motor, a couple of internal modifications to the CA are required.
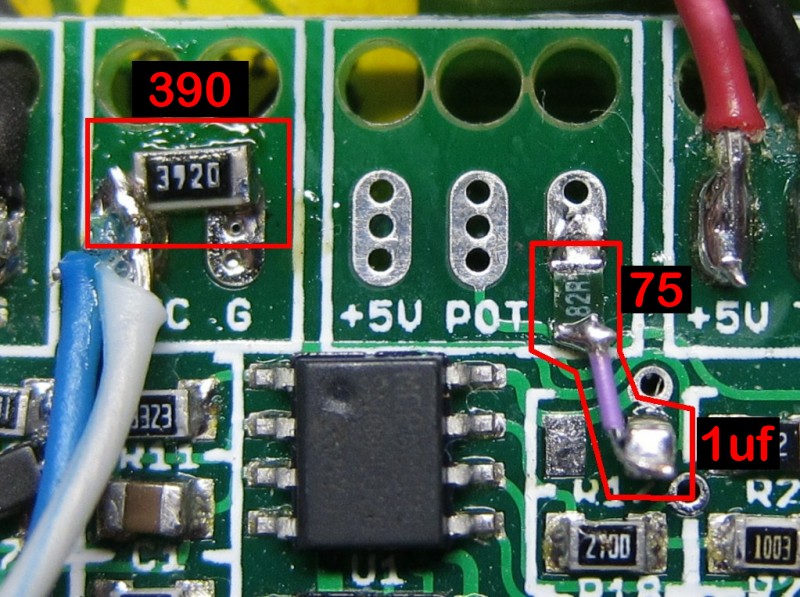
The first step is to remove R17, which is the 5v pullup resistor. Having done this, you'll find however that the Temp input on the CA still tends to float to a high voltage, as there is some leakage from the throttle input line. Thus, a pulldown resistor is needed on the Temp line to sink that voltage to ground. I experimented a bit and found that quite a low resistance is needed. With a 1k pulldown, I was still getting several degrees' worth of coupling. In the end, I settled on the same 390 ohms that I'd originally started with, which seems sufficient to keep the drift to within about 1 indicated degree at 20°.
I was still getting some jitter in the reading when the motor was actually running. My preference would have been to install an R/C filter, as is the common engineering practice when designing automotive ECUs and other such devices. The necessity of the pulldown resistor, however, prevents this. The combination of a pulldown and the series resistor of an R/C filter would create a voltage divider, and we can't have that. So I settled on a compromise, copying circuit from the LM35 datasheet, which uses a 75 ohm resistor and a 1uf capacitor in
series, between the NTC line and ground.
Here's what the finished product looks like:
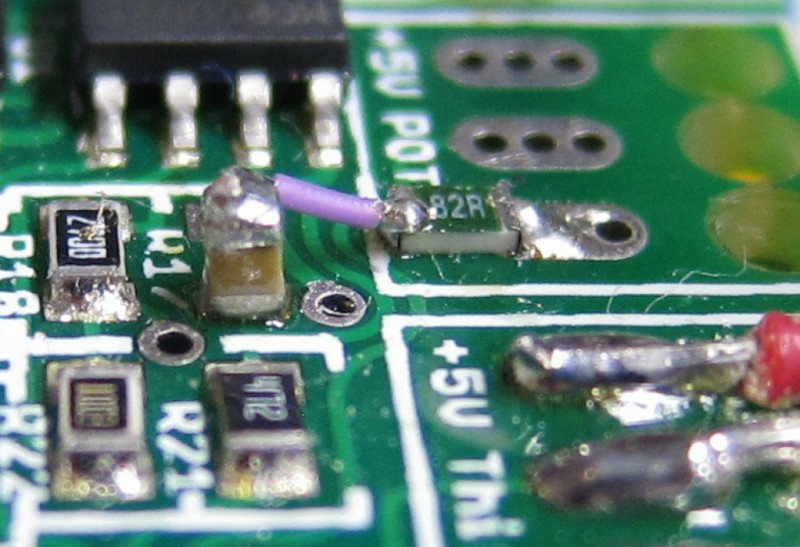
The placement of the capacitor is not obvious in this view- it is standing up vertically on the circuit board, with one end on the R17 pad which connects to NTC, and the other end jumped over to the 75 ohm resistor resting on the ground pad. Here's a side view:
With this design,I am seeing jitter of only about half a degree when running the system at 20 amps, which I find acceptable. The temperature display is quite jumpy (either a sample-and-hold or some actual averaging in the software would be nice) but it's entirely adequate for my needs. I haven't had a chance to really heat the motor up yet, however I expect that the magnitude of the jitter will diminish as temperature (and, thus, actual voltage on the NTC line) increases.