MattyCiii
100 kW
Quick update:
1) I got the power parts - servo tester, HV-160, and Astro 3210 - all working on the bench. Nice to know I can turn electrons to revolutions with parts I actually have in hand.
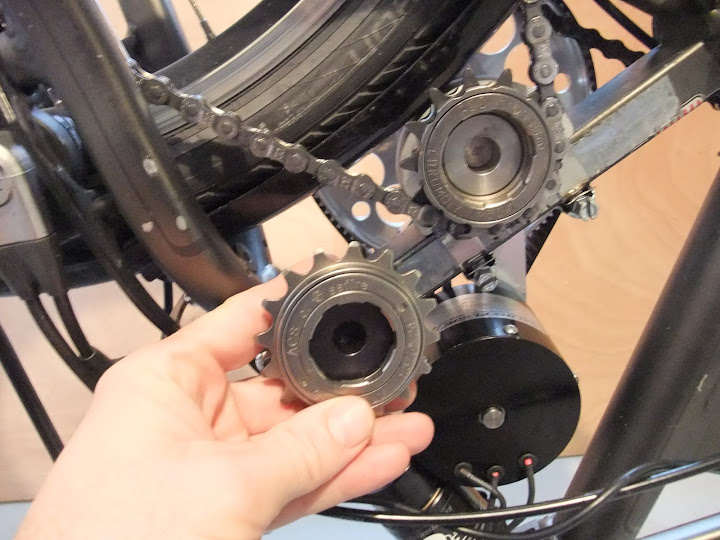
2) My custom brackets should arrive today! WOOT! With them in hand I can permanently install the reduction drive and build this thing up for real!
1) I got the power parts - servo tester, HV-160, and Astro 3210 - all working on the bench. Nice to know I can turn electrons to revolutions with parts I actually have in hand.
2) My custom brackets should arrive today! WOOT! With them in hand I can permanently install the reduction drive and build this thing up for real!
")